Function block library lenzeelectricalshaft.lib – Lenze DDS Global Drive PLC Developer Studio User Manual
Page 29
Function block library LenzeElectricalShaft.lib
Special functions
2.1.4
Homing function (L_REF)
2−19
L
LenzeElectricalShaft.lib EN 1.2
The profile generator calculates the speed profile from the set profile parameters.
·
You can make parameter changes during the homing run.
– dnHomingSpeed and wTiTimeHoming become effective when bOn_b is set = FALSE
·
Do not operate the drive at the torque limit ( MCTRL_bMMax_b = TRUE), otherwise the drive
cannot follow the velocity profile.
– Increase the up/down time wTiTimeHoming until MCTRL_bMMax_b no longer responds.
·
The phase controller in the SB MCTRL must be switched to active.
Note for use of the FB L_REF
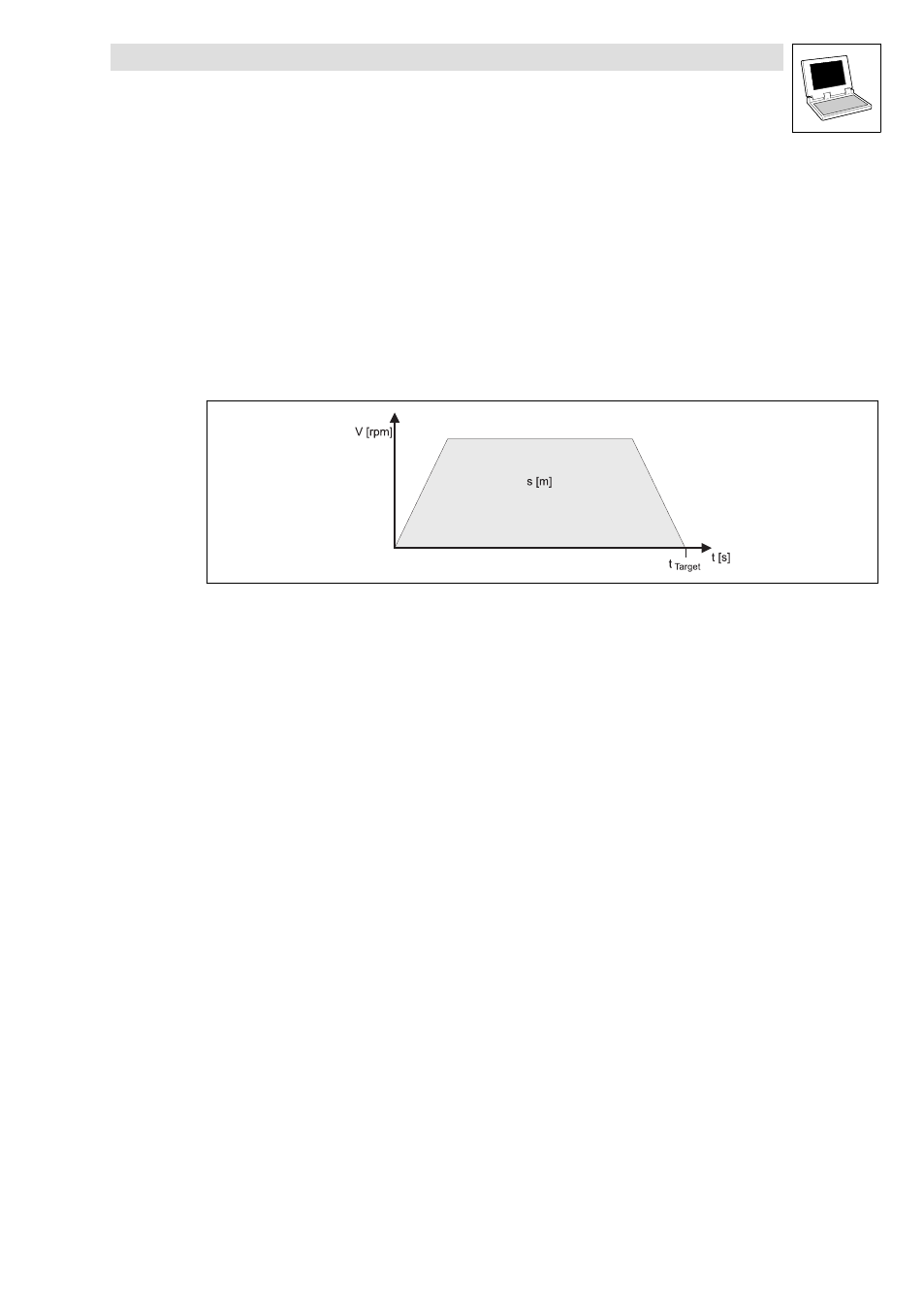
The L_REF function block calculates the path by measn of a er v(t) profile:
Abb. 2−12
v(t) profile
·
Through the input nNAct_v , the actual speed can be read in, and the actual position can be
calculated. From this calculation, via the phase−angle controller (with MCTRL_bPosOn_b =
TRUE and if L_REF.dnPosOut_p is linked to MCTRL_dnPosSet_p) the position can be
corrected, if a deviation occurs. The correction is made up to the time t
Target
. If the deviation is
so large that the phase−angle controller cannot correct it within the time t
Target
, then a
contouring error evaluation must be performed, with the aid of the FB L_DFSET.
·
The calculated position profile operates the motor control through the output
L_REF.dnPosOut_p.nNSet_a (the position profile is followed in open−loop control, not
closed−loop).
When the calculated position profile has reached L_REF.dnTargetPos_p, the homing is
finished, and L_REF.bRefOk_b is set =TRUE and L_REF.bRefBusy_b is set =FALSE.
·
The output L_REF.dnActPos_p indicates the actual position that L_REF has calculated,
through L_REF.nNAct_v .
·
The evaluation of a Touch Probe or zero−pulse can be made through the TP/MP−CTRL
interface (homing modes 0,1, 8 and 9).
·
When the end position has been reached, the internal switch of the FB L_REF changes over,
and the values from the inputs L_REF.nNIn_a and L_REF.dnPosIn_p are connected through to
the outputs L_REF.nNSet_a and L_REF.dnPosOut_p
·
If, during homing, the input bOn_b changes to FALSE, then the homing/profile is stopped, and
then continued after a fresh bOn_b=TRUE.
·
The position profile will only be processed if the drive controller is enabled.