Function block library lenzeelectricalshaft.lib – Lenze DDS Global Drive PLC Developer Studio User Manual
Page 19
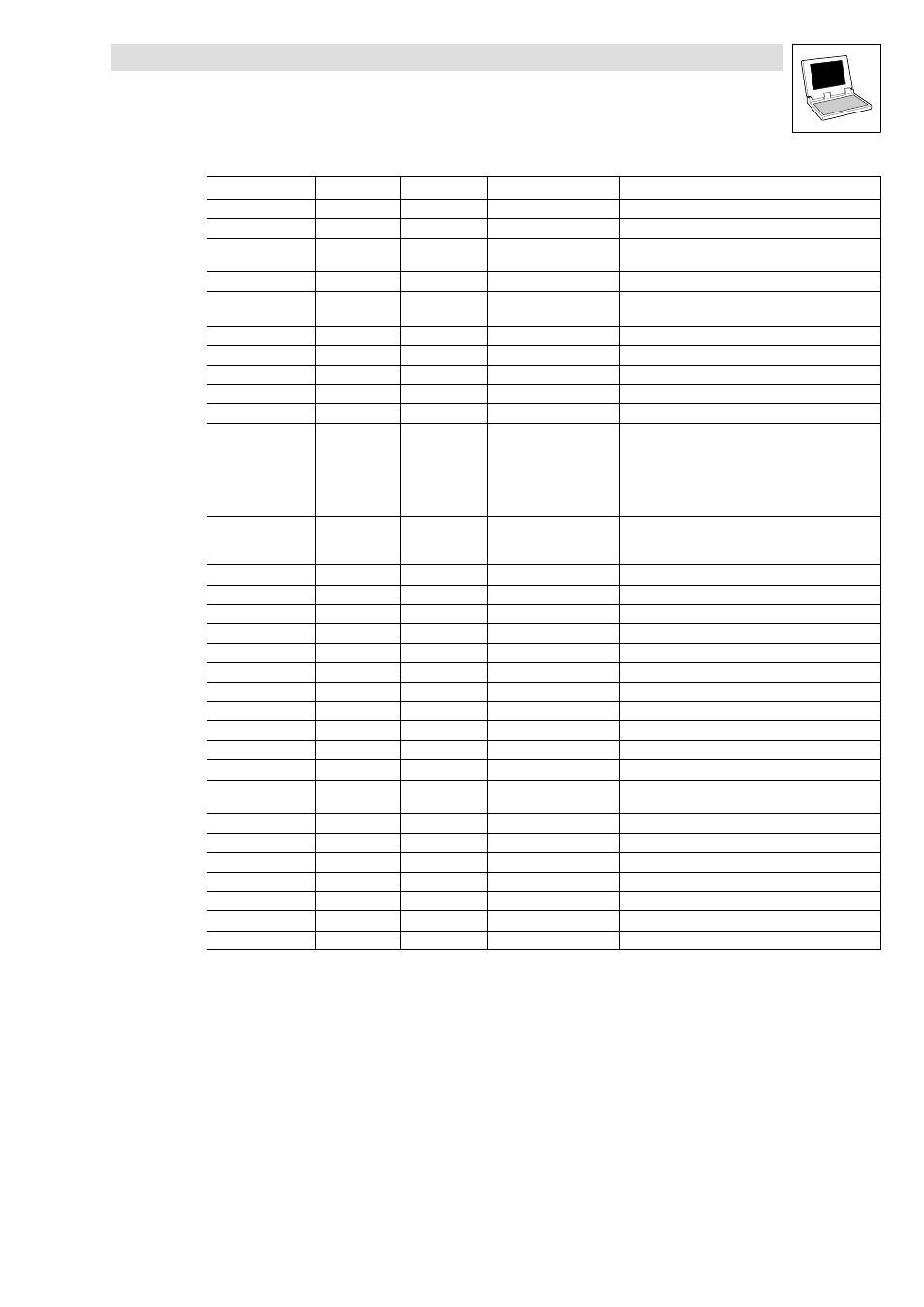
Function block library LenzeElectricalShaft.lib
Special functions
2.1.2
Digital frequency processing (L_DFSET)
2−9
L
LenzeElectricalShaft.lib EN 1.2
VariableName
DataType
SignalType
VariableType
Note
b0Pulse_b
Bool
binary
VAR_INPUT
TRUE = enable 0−pulse synchronization
bSetTPReceived_b
Bool
binary
VAR_INPUT
Setpoint TP (TouchProbe) or zero−pulse received
dnSetTPLastScan_p
Double−integer
position
VAR_INPUT
Phase−angle difference between TP setpoint and start
of the task
bActTPReceived_b
Bool
binary
VAR_INPUT
Actual value TP or zero−pulse received
dnActLastScan_p
Double−integer
position
VAR_INPUT
Phase−angle difference between TP actual value and
start of the task
nSpeedTrim_v
Integer
velocity
VAR_INPUT
Speed trimming in [rpm]. (16384
º 15000 rpm)
nSpeedTrim_a
Integer
analog
VAR_INPUT
Speed trimming in [%]. (C0011
º 100 % º 16384)
nGearNominator
Integer
analog/velocity
VAR_INPUT
Numerator for gearing factor (100 %
º 16384 incr.)
nGainNominator
Integer
analog/velocity
VAR_INPUT
Numerator stretch factor (100 %
º 16384 incr.)
nSet_v
Integer
velocity
VAR_INPUT
Speed/Phase setpoint
bSetIntegrator_b
Bool
binary
VAR_INPUT
·
TRUE = set phase−angle integrators to be equal
·
FALSE−TRUE edge sets dnPosDiffOut_p = 0
·
TRUE−FALSE edge sets dnPSet_p = actual value of
MCTRL_dnPosSet_p
·
bSetIntegrator_b has a higher priority than
bResetAllIntegrators_b
bResetAllIntegrators_b
Bool
binary
VAR_INPUT
·
TRUE = sets position difference = 0
·
TRUE = sets dnPosSetOut_p and
dnPosDiffOut_p = 0
nPositionTrimming
Integer
analog/velocity
VAR_INPUT
Phase−angle trimming (100 %
º 16384 incr.)
nNAct_v
Integer
velocity
VAR_INPUT
Actual value for calculating the actual position
bAck_b
Bool
binary
VAR_OUTPUT
TRUE = synchronizing is performed
nSetOut_v
Integer
velocity
VAR_OUTPUT
Speed/Phase setpoint
nSetSpeedOut_a
Integer
analog
VAR_OUTPUT
in [%] of nmax. (C0011
º 100 % º 16384)
dnPosDiffOut_p
Double−integer
position
VAR_OUTPUT
Contouring error for phase controller
dnPosSetOut_p
Double−integer
position
VAR_OUTPUT
Phase−angle setpoint (65536 incr.
º 1 turn)
bFollowingErr_b
Bool
binary
VAR_OUTPUT
Status: TRUE = contouring error
bPosOverflow_b
Bool
binary
VAR_OUTPUT
Status: TRUE = phase−angle controller overflow
wGearDenom
Word
−
VAR CONSTANT RETAIN
Gearbox factor denominator
dnPosOffset
Double−integer
−
VAR CONSTANT RETAIN
Phase offset
nSpeedDepend
PosOffset
Integer
−
VAR CONSTANT RETAIN
Speed−dependent phase trimming
dwFollowingErrWin
Double−integer
−
VAR CONSTANT RETAIN
Contouring error limit
nAngleOffsetMult
Integer
−
VAR CONSTANT RETAIN
Multiplier for the phase−angle trimming offset
bWithoutGearFactor
Bool
−
VAR CONSTANT RETAIN
Evaluation of the set−phase integrator
wAct0PulseDiv
Word
−
VAR CONSTANT RETAIN
Actual zero−pulse divider
wGainDenom
Word
−
VAR CONSTANT RETAIN
Denominator of the stretch factor
by0PulseFunc
Byte
−
VAR CONSTANT RETAIN
Zero−pulse function (synchronization mode)
wSet0PulseDiv
Word
−
VAR CONSTANT RETAIN
Set zero−pulse divider