Function block library lenzeelectricalshaft.lib, 3 synchronization to zero track or touchprobe, Lenzeelectricalshaft.lib en 1.2 – Lenze DDS Global Drive PLC Developer Studio User Manual
Page 22
Function block library LenzeElectricalShaft.lib
Special functions
2.1.2
Digital frequency processing (L_DFSET)
2−12
L
LenzeElectricalShaft.lib EN 1.2
2.1.2.3
Synchronization to zero track or TouchProbe
D F I N _ b T P R e c e i v e d _ b
D F I N _ d n I n c L a s t S c a n _ p
M C T R L _ b A c t T P R e c e i v e d _ b
M C T R L _ d n A c t I n c L a s t S c a n _ p
M C T R L _ n N A c t _ v
L _ D F S E T
b 0 P u l s e _ b
C T R L
b
b
*
a
b
a
*
a
b
a
0
1
*
M O N I T - P 0 3
M O N I T - P 1 3
c o n s t
b y 0 P u l s e F u n c
w A c t 0 P u l s e D i v
w S e t 0 P u l s e D i v
w G a i n D e n o m
w G e a r D e n o m
b W i t h o u t G e a r F a c t o r
d n P o s O f f s e t
n S p e e d D e p e n d P o s O f f s e t
b S e t T P R e c e i v e d _ b
d n S e t T P L a s t S c a n _ p
b A c t T P R e c e i v e d _ b
d n A c t L a s t S c a n _ p
n S p e e d T r i m _ v
n S p e e d T r i m _ a
n G e a r N o m i n a t o r
n G a i n N o m i n a t o r
n S e t _ v
b S e t I n t e g r a t o r _ b
b R e s e t A l l I n t e g r a t o r s _ b
n P o s i t i o n T r i m m i n g
d n P o s S e t O u t _ p
d n P o s D i f f O u t _ p
n S e t S p e e d O u t _ a
n S e t O u t _ v
I n t e r v a l T i m e
T A S K
I n t e r v a l T i m e
T A S K
d w F o l l o w i n g E r r W i n
b F o l l o w i n g E r r _ b
b P o s O v e r f l o w _ b
n N A c t _ v
n A n g l e O f f s e t M u l t
b A c k _ b
D F I N _ n I n _ v
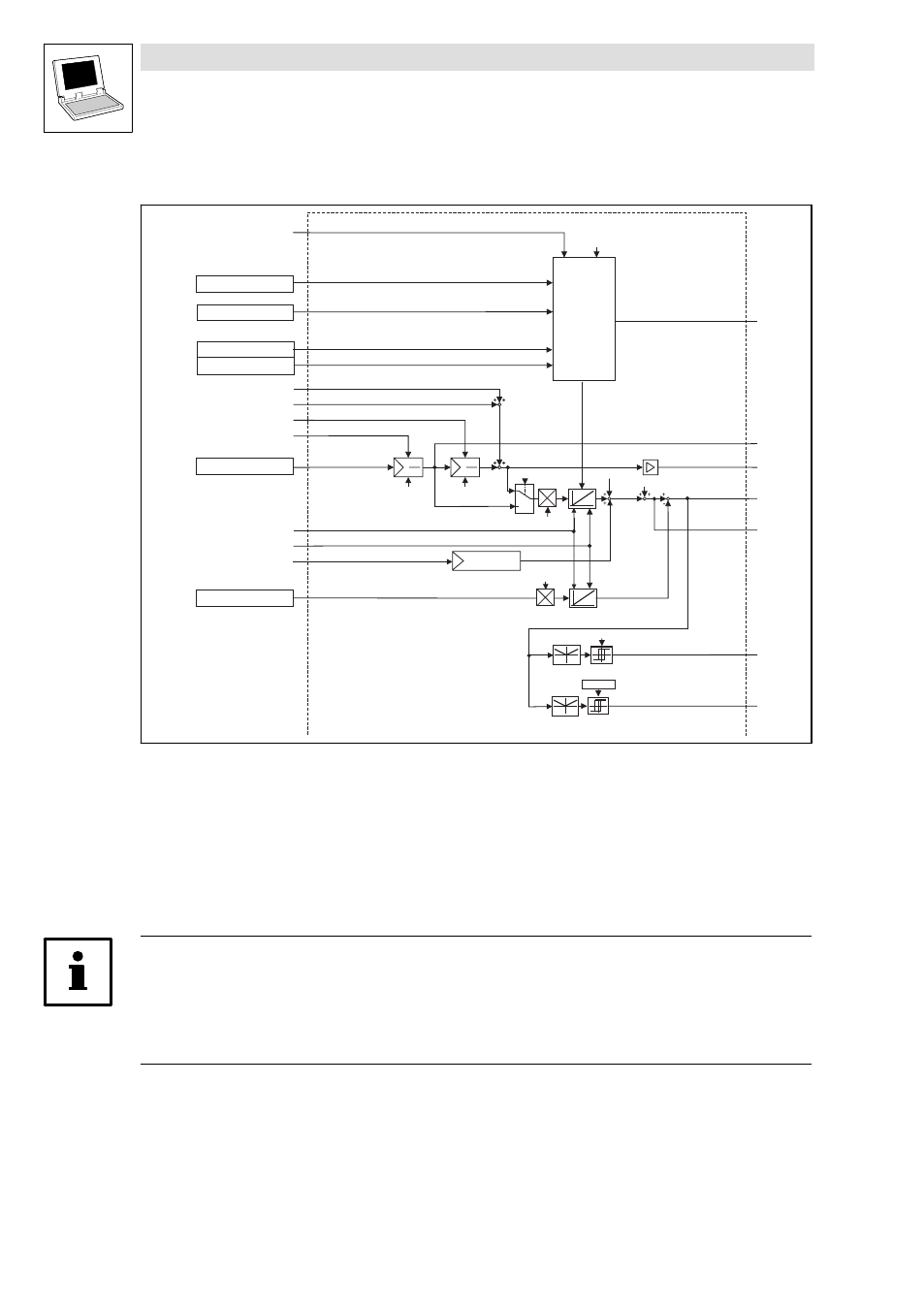
Abb. 2−7
Programming L_DFSET for synchronization to zero track or TP (TouchProbe)
The synchronization of the actual value (SB MCTRL_MotorControl) to the setpoint (SB
DF_IN_DigitalFrequency) is made through a zero−pulse or TP (TouchProbe).
·
The setpoint is provided through L_DFSET1.nSet_v. (16384
º 15000 rpm)
·
The actual value is provided through L_DFSET1.nNAct_v. (16384
º 15000 rpm)
Zero−pulse from actual value:
·
Set code C0911 (SB MCTRL_MotorControl) to 0.
Tip!
Touch probe initiators can have response delay times that cause a speed−dependent phase−angle
offset.
Code C0910 can be used to set a correction value (−32767 incr. ... 32767 incr.) for this phase−angle
offset (65536
º 1 motor turn).
·
Code C0490 is used to select the correct feedback system:
0 Resolver
1 Encoder TTL
2 Encoder sin
3 Absolute ST
4 Absolute MT