Prevailing torque – HMC Electronics ASG-SD2500-10FX-SY X-PAQ Precision Fastening System User Manual
Page 16
Page 16
Prevailing Torque
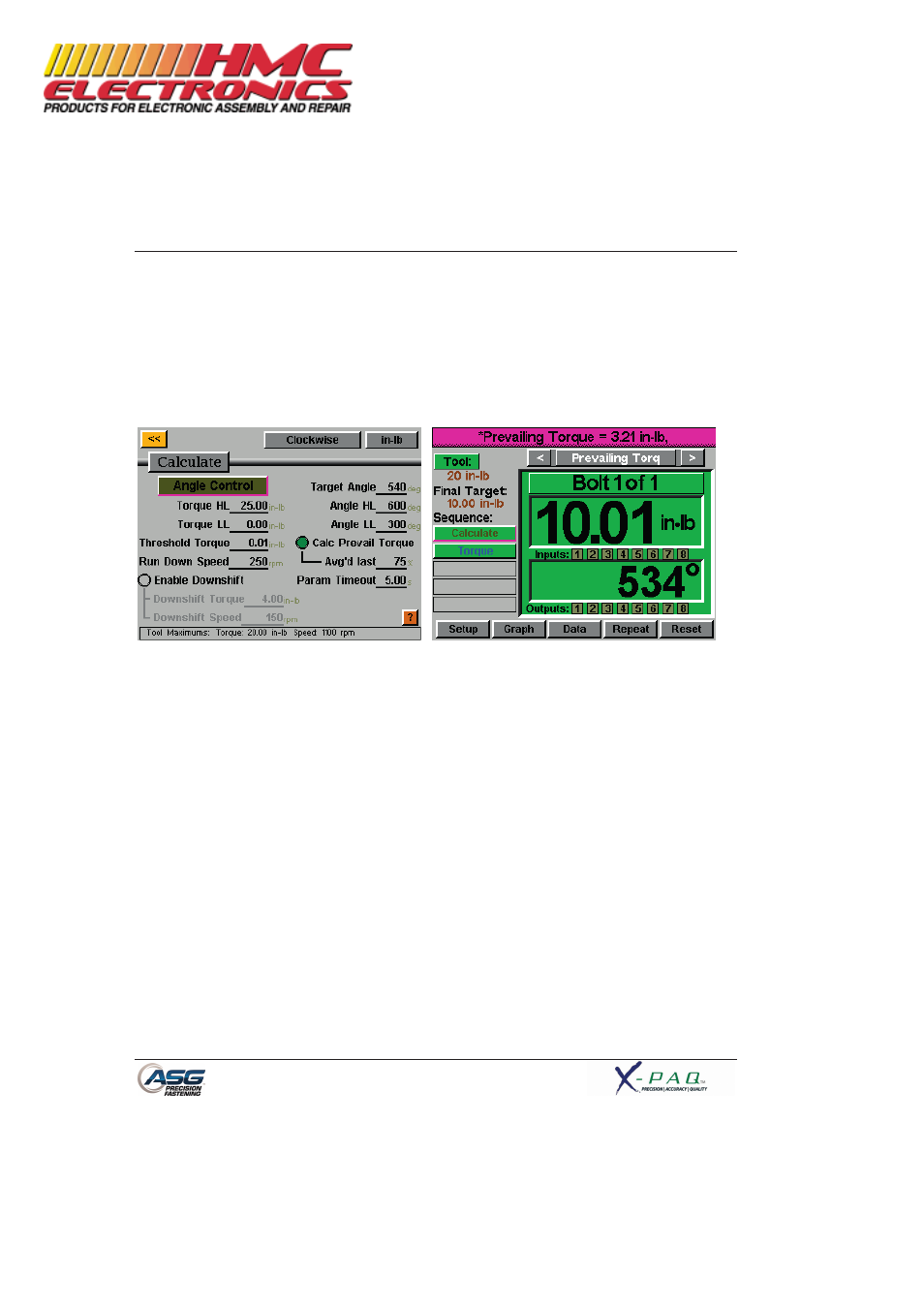
Certain applications (such as self tapping fasteners or locking helical inserts) require compensation for
the prevailing torque of a fastener in the final torque of the rundown. This can be accomplished using
the ‘Calc Prevail Torque’ feature in an angle control parameter. For easy identification, angle control
parameters using the prevailing torque option have a purple outline on the parameter blocks.
The desired compensation can be accomplished by programming a 2-step rundown, starting with an
angle control parameter (with the prevailing torque calculation enabled), followed by a torque control
parameter.
In the example shown above, the fastener is rotated 540 degrees in step 1, during the last 405 degrees
(75%) the prevailing torque is monitored and the average value reported. Step 2 is then performed to a
target of 10 inlb, but the actual applied torque is the final torque of 10.01 inlb plus the 3.21 inlb
calculated for a total of 13.22 inlb.
Utilizing this method will calculate the prevailing torque for each fastener eliminating the need to
determine an average value for all fasteners and then using a standard torque profile only with a larger
target.
Documentation Provided By HMC Electronics
33 Springdale Ave. Canton, MA 02021
(800) 482-4440
- ASG-SD2500-10PL-SY X-PAQ Precision Fastening System ASG-SD2500-10PS-SY X-PAQ Precision Fastening System ASG-SD2500-20FX-SY X-PAQ Precision Fastening System ASG-SD2500-20PS-SY X-PAQ Precision Fastening System ASG-SD2500-35FX-SY X-PAQ Precision Fastening System ASG-SD2500-35PL-SY X-PAQ Precision Fastening System ASG-SD2500-35PS-SY X-PAQ Precision Fastening System ASG-SD2500-50PL-SY X-PAQ Precision Fastening System ASG-SD2500-50PS-SY X-PAQ Precision Fastening System