Main feedback – ElmoMC SimplIQ Digital Servo Drives-Solo Trombone Installation Guide User Manual
Page 28
Solo Trombone Installation Guide
Installation
MAN-SOLTROIG (Ver. 1.203)
28
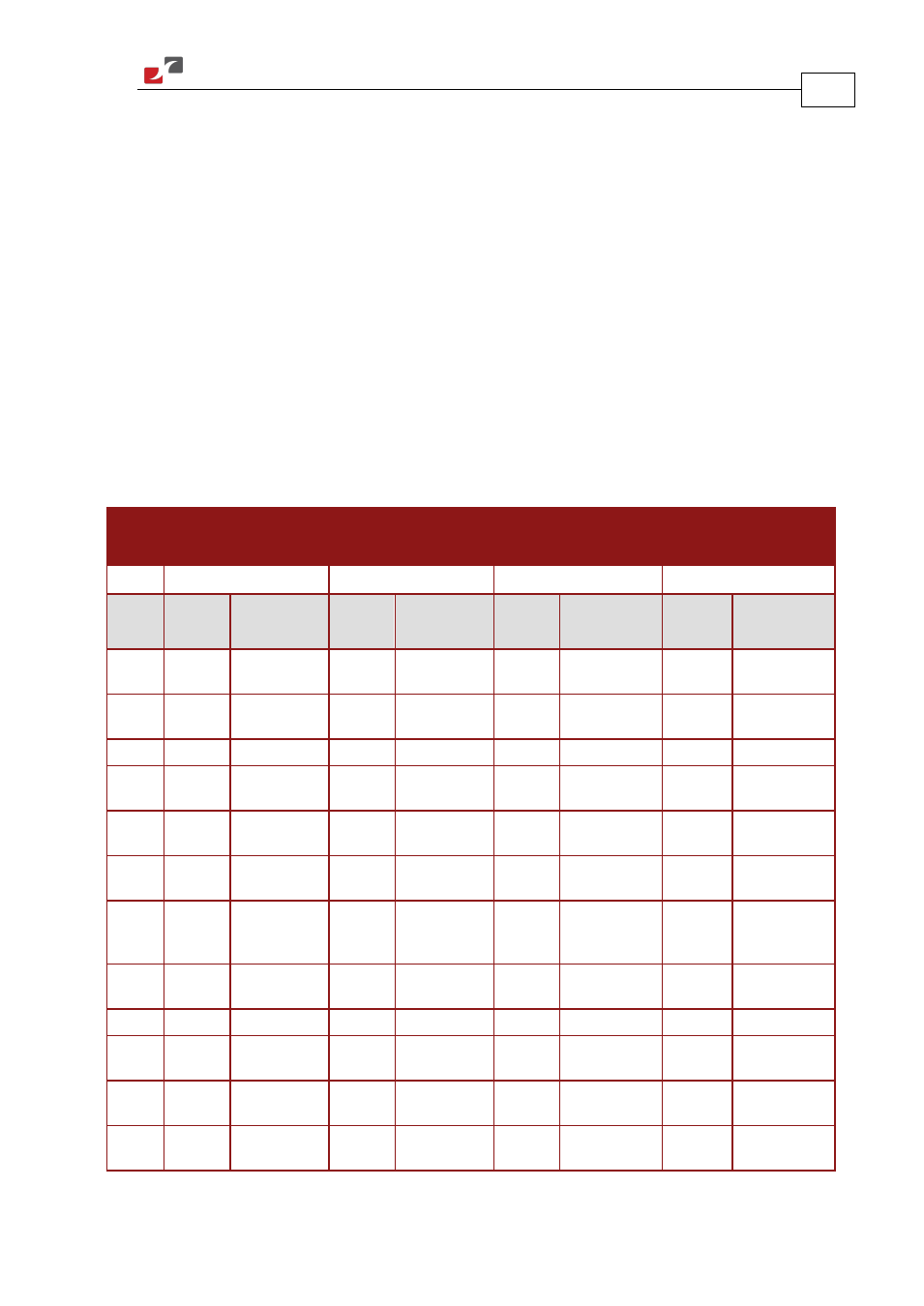
3.3.6.
Main Feedback
The main feedback cable is used to transfer feedback data from the motor to the drive.
The Solo Trombone can accept any one the following devices as a main feedback mechanism:
•
Incremental encoder only
•
Incremental encoder with digital Hall sensors
•
Digital Hall sensors only
•
Interpolated Analog (Sine/Cosine) encoder (option)
•
Resolver (option)
•
Tachometer (option)
•
Potentiometer (option)
•
Absolute Encoder (Heidenhain 2.1 or Stegmann)
•
Panasonic absolute encoder
Incremental
Encoder
Interpolated
Analog Encoder
Resolver
Tachometer and
Potentiometer
SOL-
AR
TRO
XX
/
YYY
_ SOL -
AR
TRO
XX
/
YYY
I SOL -
AR
TRO
XX
/
YYY
R SOL -
AR
TRO
XX
/
YYY
T
Pin
(J10)
Signal Function
Signal Function
Signal Function
Signal Function
14
HC
Hall sensor C
input
HC
Hall sensor C
input
NC
-
HC
Hall sensor C
input
12
HA
Hall sensor A
input
HA
Hall sensor A
input
NC
-
HA
Hall sensor A
input
15
SUPRET
Supply return
SUPRET
Supply return
SUPRET
Supply return
SUPRET
Supply return
2
+5V
Encoder/Hall
+5V supply
+5V
Encoder/Hall +5V
supply
+5V
Encoder/Hall +5V
supply
+5V
Encoder/Hall
+5V supply
4
CHA-
Channel A
complement
A-
Sine A
complement
S3
Sine A
complement
Tac 1-
Tacho Input 1
Neg. (20 V max)
3
CHA
Channel A
A+
Sine A
S1
Sine A
Tac 1+
Tacho Input 1
Pos. (20 V max)
8
INDEX-
Index
complement
R-
Reference
complement
R2
Vref complement
f= 1/TS, 50 mA
Maximum
NC
-
7
INDEX
Index
R+
Reference
R1
Vref f=1/TS,
50 mA Max.
POT
Potentiometer
Input
1
SUPRET
Supply return
SUPRET
Supply return
SUPRET
Supply return
SUPRET
Supply return
11
HB
Hall sensor B
input
HB
Hall sensor B
input
NC
-
HB
Hall sensor B
input
6
CHB-
Channel B
complement
B-
Cosine B
complement
S4
Cosine B
complement
Tac 2-
Tacho Input 2
Neg. (50 V max)
5
CHB
Channel B
B+
Cosine B
S2
Cosine B
Tac 2+
Tacho Input 2
Pos. (50 V max)
Table 5: Main Feedback Cable Pin Assignments (Part A)