Main feedback – ElmoMC SimplIQ Digital Servo Drives-Bell Installation Guide User Manual
Page 27
Bell Installation Guide
Installation
MAN-BELIG (Ver. 1.302
27
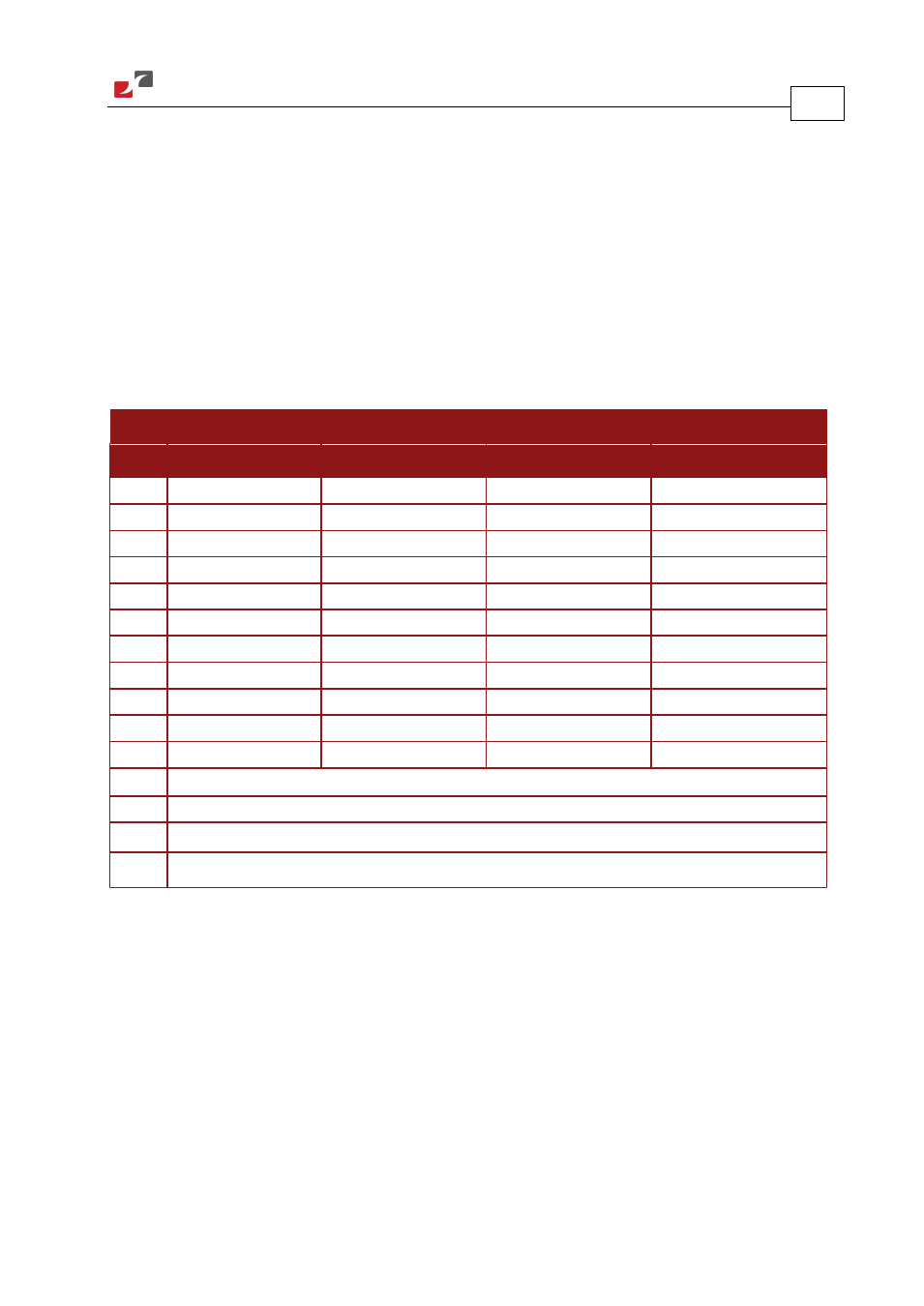
3.9. Main Feedback
The Main Feedback port is used to transfer feedback data from the motor to the drive.
The Bell can accept any of the following devices as a main feedback mechanism:
•
Incremental encoder only.
•
Incremental encoder with digital hall sensors.
•
Digital hall sensors only.
•
Incremental Analog (Sine/Cosine) encoder (option).
Incremental Encoder
Interpolated Analog Encoder
Pin
Signal
Function
Signal
Function
J2/13
HC
Hall sensor C input
NC
-
J2/11
HA
Hall sensor A input
NC
-
J2/2
SUPRET
Supply return
SUPRET
Supply return
J2/1
+5V
Encoder/Hall +5V supply
+5V
Encoder/Hall +5V supply
J2/6
CHA-
Channel A complement
A-
Sine A complement
J2/5
CHA
Channel A
A+
Sine A
J2/10
INDEX-
Index complement
R-
Index
complement
J2/9
INDEX
Index
R+
Index
J2/12
HB
Hall sensor B input
NC
-
J2/8
CHB-
Channel B complement
B-
Cosine B complement
J2/7
CHB
Channel B
B+
Cosine B
J2/3
ANALIN+ is used for Analog Input
J2/4
ANALIN- is used for Analog Input
J2/14
LED_2_OUT (AOKLED cathode) is used for LED indication
J2/15
LED_1_OUT (AOKLED anode) is used for LED indication
Table 3: Main Feedback Pin Assignments