Controller programming, Setpoint master control – Red Lion TCU User Manual
Page 6
CONTROLLER PROGRAMMING
The TCU has been designed to reduce the operator interaction with the
controller while still maintaining a high degree of control accuracy and user
flexibility. Front Panel Program Disable allows all of the controller’s set-ups to be
locked-out from further operator intervention after the initial parameter set-up.
The programming of the controller is divided into four sections:
Unprotected Parameter Mode
Configuration Parameter Mode
Protected Parameter Mode
Hidden Function Mode
These four programming modes allow the controller to adapt to any required
user-interface level.
UNPROTECTED PARAMETER MODE
*
The unprotected parameter mode is accessible when program disable is
inactive or when the proper access code number from the protected mode is
entered.The configuration parameter modes can be accessed only from this mode.
“SP”
- Enter Setpoint
“OP”
- Enter output power
“ProP” - Enter proportional band
“Intt”
- Enter integral time
“dErt” - Enter derivative time
“rtio”
- Enter Remote Setpoint ratio value
“bIAS” - Enter Remote Setpoint bias value
“SP-2” - View internal cascade secondary setpoint
demand
“Pb-2” - Enter internal cascade, secondary
proportional band
“It-2”
- Enter internal cascade, secondary integral
time
“dt-2” - Enter internal cascade, secondary
derivative time
“AL-1” - Enter value for alarm #1
“AL-2” - Enter value for alarm #2
“CNFP” - Select basic configuration mode
“End” - Return to normal display mode
*
These parameters may not appear due to option configuration or other
programming.
CONFIGURATION PARAMETER MODE
The configuration parameter mode allows the operator to set-up the basic
requirements of the controller. It is divided into sections which group together
related programming steps, such as inputs, outputs, alarms, etc. Upon
completion of each section, the program returns to the configuration selection
stage allowing the user to return to the normal display mode.
Configuration 1, Inputs
“tYPE” - Select input probe type
“SCAL” - Select temperature scale
“dCPt” - Select temperature resolution
“FLtr” - Select level of input filtering
“SPAN” - Enter input correction span (slope)
“SHFt” - Enter input correction shift (offset)
“SPLO” - Enter setpoint lower limit
“SPHI” - Enter setpoint higher limit
“SPrP” - Enter setpoint ramp rate
“InPt” - Select user input function
*
“HCur” - Enter full scale heater current
*
Configuration 2, Outputs
“CYCt” - Enter time proportioning cycle time
“OPAC” - Select control action
“OPLO” - Enter output power low limit
“OPHI” - Enter output power high limit
“OPFL” - Enter probe fail power preset
“OPdP” - Enter output control dampening
“CHYS” - Enter ON/OFF control hysteresis
“tcod” - Select auto-tuning dampening
“ANAS” - Select linear DC output assignment
*
“ANLO” - Enter linear DC output low scaling value
*
“ANHI” - Enter linear DC output high scaling value
*
“ANdb” - Enter linear DC output control deadband
*
“ANUt” - Enter linear DC output update time
*
Configuration 3, Parameter lock-outs
“SP”
- Select degree of setpoint access
“OP”
- Select degree of power access
“dEv” - Enable deviation display
*
“IN-2” - Enable second input display
*
“HCur” - Enable heater current display
“UdSP” - Enable temperature scale display
“CodE” - Enter parameter access code
“PId”
- Select degree of PID access
“PId2” - Select degree of secondary PID access
*
“rtbS” - Select degree of ratio/bias access
*
“AL”
- Select degree of alarm access
*
“ALrS” - Enable alarm reset access
*
“SPSL” - Enable local/remote setpoint selection
*
“trnF” - Enable auto/manual mode selection
“tUNE” - Enable auto-tune invocation
Configuration 4, Alarms
*
“Act1” - Select operation mode of alarm #1
“rSt1” - Select reset mode of alarm #1
“Stb1” - Enable activation delay of alarm #1
“AL-1” - Enter value for alarm #1
“Act2” - Select operation mode of alarm #2
“rSt2” - Select reset mode of alarm #2
“Stb2” - Enable activation delay of alarm #2
“AL-2” - Enter value for alarm #2
“AHYS” - Enter hysteresis value for both alarms
Configuration 5, Cooling
*
“CYC2” - Enter cooling time proportioning cycle time
“GAN2” - Enter cooling relative gain
“db-2” - Enter heat/cool deadband or overlap
DSP
PAR
%PW
SEC
REM
OP1
AL1
AL2
DSP
PAR
DEV
%PW
OP1 AL2
MAN AL1
REMOTE SETPOINT
MASTER
UNIT
SLAVE
UNIT #1
PROCESS #1
PROCESS #2
MAIN
INPUT
MAIN
INPUT
SECOND INPUT
%PW REM AL1
AL2
MAIN
INPUT
PROCESS "N"
DSP
PAR
OP1
SEC
REMOTE SETPOINT
SECOND INPUT
(UP TO 50)
SLAVE
UNIT `N'
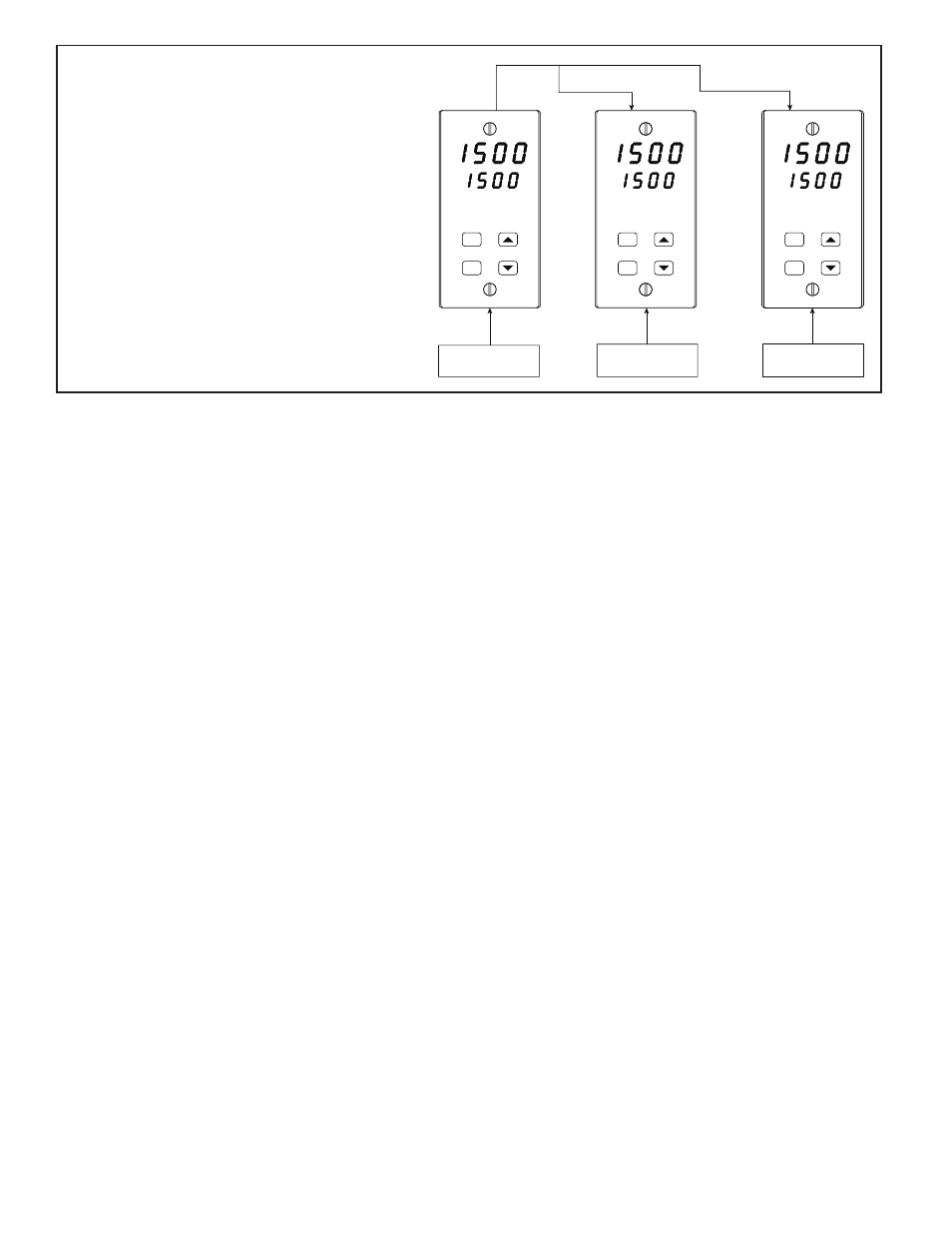
LINEAR DC OUTPUT SETPOINT RE-TRANSMISSION
6
SETPOINT MASTER CONTROL
Setpoint Master Control allows automatic setpoint changes to slave
controller units (up to 50 units total) from a master TCU controller.
The linear DC output of the master is looped with the second analog
input of the slave TCU controllers. Each slave unit can have unique
remote setpoint ratio and bias values.
Setpoint Slave Configuration Parameters
“OPEr” - Select remote setpoint mode
“root” - Select second input square root
Linearization
“dPt2” - Select second input decimal point
“dSP1” - Enter scaling units of second input
“INP1” - Enter scaling units of second input
“dSP2” - Enter scaling units of second input
“INP2” - Enter scaling units of second input
“SPLO”
“SPHI”
- Limit range of remote setpoint
“SPrP” - Limit rate of change of remote
setpoint
Setpoint Slave Operational Parameters
“rtio”
- Second input ratio
“bIAS” - Second input bias