Command response time, Serial commands for ld software – Red Lion LDSG User Manual
Page 17
17
(CSR) Control Status Register
The Control Status Register is used to directly control the meter’s setpoint
outputs and interrogate the state of the setpoint outputs. The register is bit
mapped with each bit position within the register assigned to a particular control
function. The control function are invoked by writing to each bit position. The
bit position definitions are:
bit 0: Setpoint 1 Output Status
0 = output off
1 = output on
bit 1: Setpoint 2 Output Status
0 = output off
1 = output on
bit 2: Not Used
bit 3: Not Used
bit 4: Manual Mode
0 = automatic mode
1 = manual mode
bit 5: Always stays 0, even if 1 is sent.
bit 6: Not Used
bit 7: Always stays 0, even if 1 is sent.
Although the register is bit mapped starting with bit 7, HEX < > characters
are sent in the command string. Bits 7 and 5 always stay a zero, even if a “1” is
sent. This allows ASCII characters to be used with terminals that may not have
extended character capabilities.
Writing a “1” to bit 4 of CSR selects manual mode. In this mode, the setpoint
outputs are defined by the values written to the bits b0 and b1. Internal control
of these outputs is then overridden.
In automatic mode, the setpoint outputs can only be reset off. Writing to the
setpoint output bits of the CSR has the same effect as a Reset command (R). The
contents of the CSR may be read to interrogate the state of the setpoint outputs.
Examples:
1. Set manual mode, turn all setpoints off:
V is command write, J is CSR and * is terminator.
2. Turn SP1 output on and SP2 output off:
Note: Avoid writing values <0A> (LF), <0D> (CR), <24> ($) and <2E> (*)
to the CSR. These values are interpreted by the meter as end of command
control codes and will prematurely end the write operation.
SERIAL COMMANDS FOR LD SOFTWARE
7 6 5 4 3 2 1 0:bit location
VJ<30>* or VJ0*
ASCII 0 = 0 0 1 1 0 0 0 0 or <30>
VJ<31>* or VJ1*
or <31>
1
0
0
0
1
1
0
0
ASCII 1 =
0:bit location
1
2
3
4
5
6
7
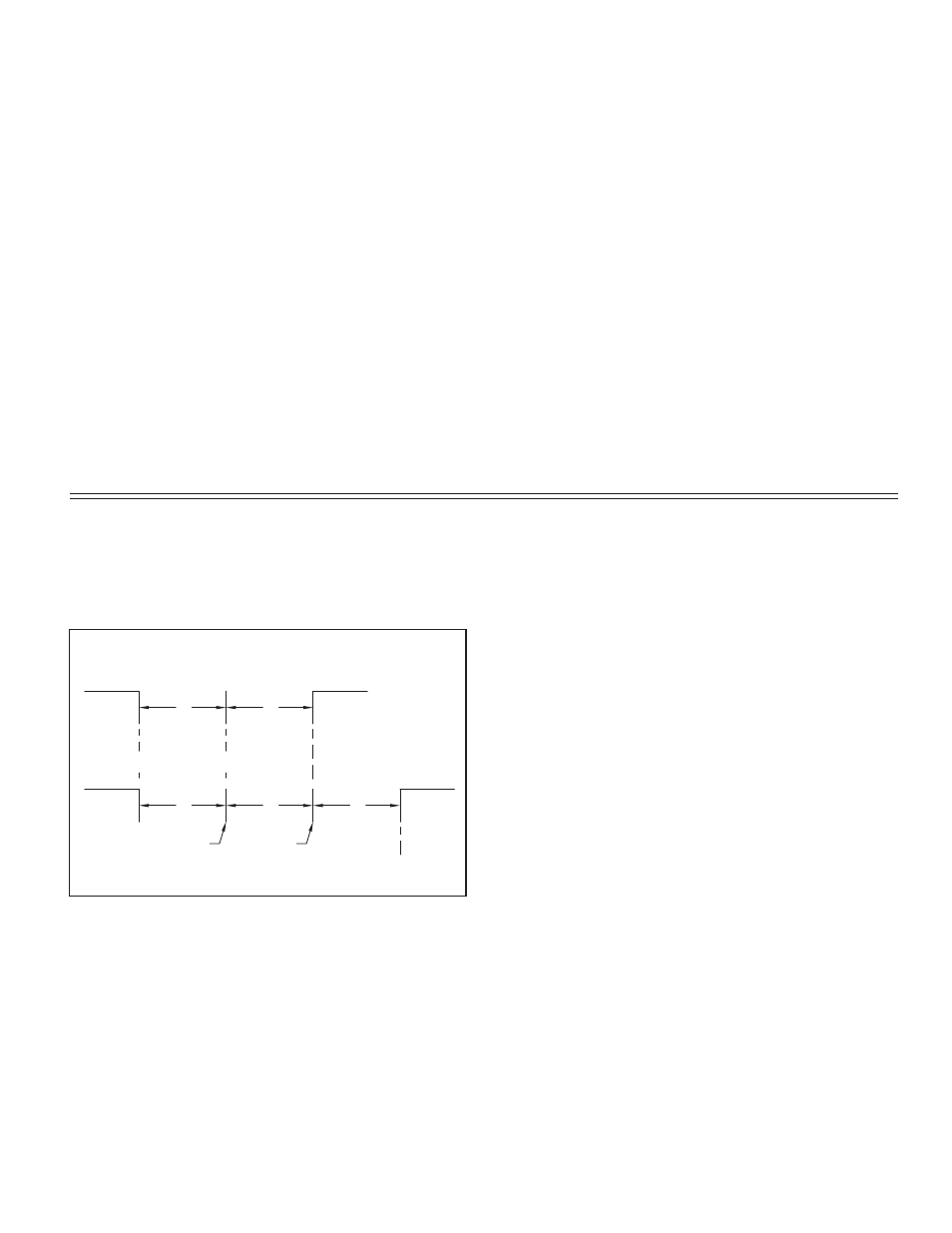
Command Response Time
The meter can only receive data or transmit data at any one time (half-duplex
operation). The meter ignores commands while transmitting data, but instead
uses RXD as a busy signal. When sending commands and data to the meter, a
delay must be imposed before sending another command. This allows enough
time for the meter to process the command and prepare for the next command.
At the start of the time interval t
1
, the computer program prints or writes the
string to the com port, thus initiating a transmission. During t
1
, the command
characters are under transmission and at the end of this period, the command
terminating character (*) is received by the meter. The time duration of t
1
is
dependent on the number of characters and baud rate of the channel.
t
1
= (10 * # of characters) / baud rate
At the start of time interval t
2
, the meter starts the interpretation of the
command and when complete, performs the command function. This time
interval t
2
varies from 2 msec to 50 msec. If no response from the meter is
expected, the meter is ready to accept another command.
If the meter is to reply with data, the time interval t
2
is controlled by the use
of the command terminating character. The standard command line terminating
character is ‘*’. This terminating character results in a response time window of
50 msec minimum and 100 msec maximum. This allows sufficient time for the
release of the sending driver on the RS485 bus. Terminating the command line
with ‘$’ results in a response time window (t
2
) of 2 msec minimum and 50 msec
maximum. The faster response time of this terminating character requires that
sending drivers release within 2 msec after the terminating character is received.
At the beginning of time interval t
3
, the meter responds with the first
character of the reply. As with t
1
, the time duration of t
3
is dependent on the
number of characters and baud rate of the channel. t
3
= (10 * # of characters) /
baud rate. At the end of t
3
, the meter is ready to receive the next command.
The maximum serial throughput of the meter is limited to the sum of the
times t
1
, t
2
and t
3
.
Ready
Ready
1
t
t
2
Ready
t
1
t
2
Ready
t
3
Command
String
Transmission
Meter
Response
Time
Command
Terminator
Received
First
Character
of Reply
Reply
Transmission
NO REPLY FROM METER
RESPONSE FROM METER
Time
Timing Diagram Figure