5 control inputs c1 and c2 – KROHNE IFC 110 Converter EN User Manual
Page 18
18
IFC 110 F
05/2003
2.4
Status outputs A1 / A2 / D1 / D2
PLEASE NOTE:
The output terminal A1 can be used as status output A1 or as a 2nd pulse output A1 for
electromechanical totalizers.
Setting is as described in Fct. 3.07 HARDWARE, see Sections 4.4 and 5.18.
• Status outputs A1/A2 and D1/D2 with the common centre grounding contacts A⊥ and B⊥ are
electrically isolated from each other and from all other circuits.
• Setting data and functions can note down in the Table in Sect. 3.
Please also refer to Section 2.7 ”Standard factory settings”.
• All operating data and functions are adjustable, see Sections 4.4 and 5.8, Fct. 1.07-1.10.
• Active mode:
uses the internal power supply, terminals E+/E-
Passive mode:
requires external power supply, U
ext
≤ 32V DC/24V AC, I ≤ 100mA
(I
≤ 200mA for A1 in case of polarized DC operation, see Section 6.3)
• The following operating conditions can be signalled using the status outputs:
- flow direction (F/R mode)
- limits
- error messages
- active range in case of range change-over
- inverse operation of A1 and A2 or D1 and D2,
i.e. used as change-over switch with common centre grounding contact A
⊥ or D⊥.
• Connection diagrams see Section 2.6
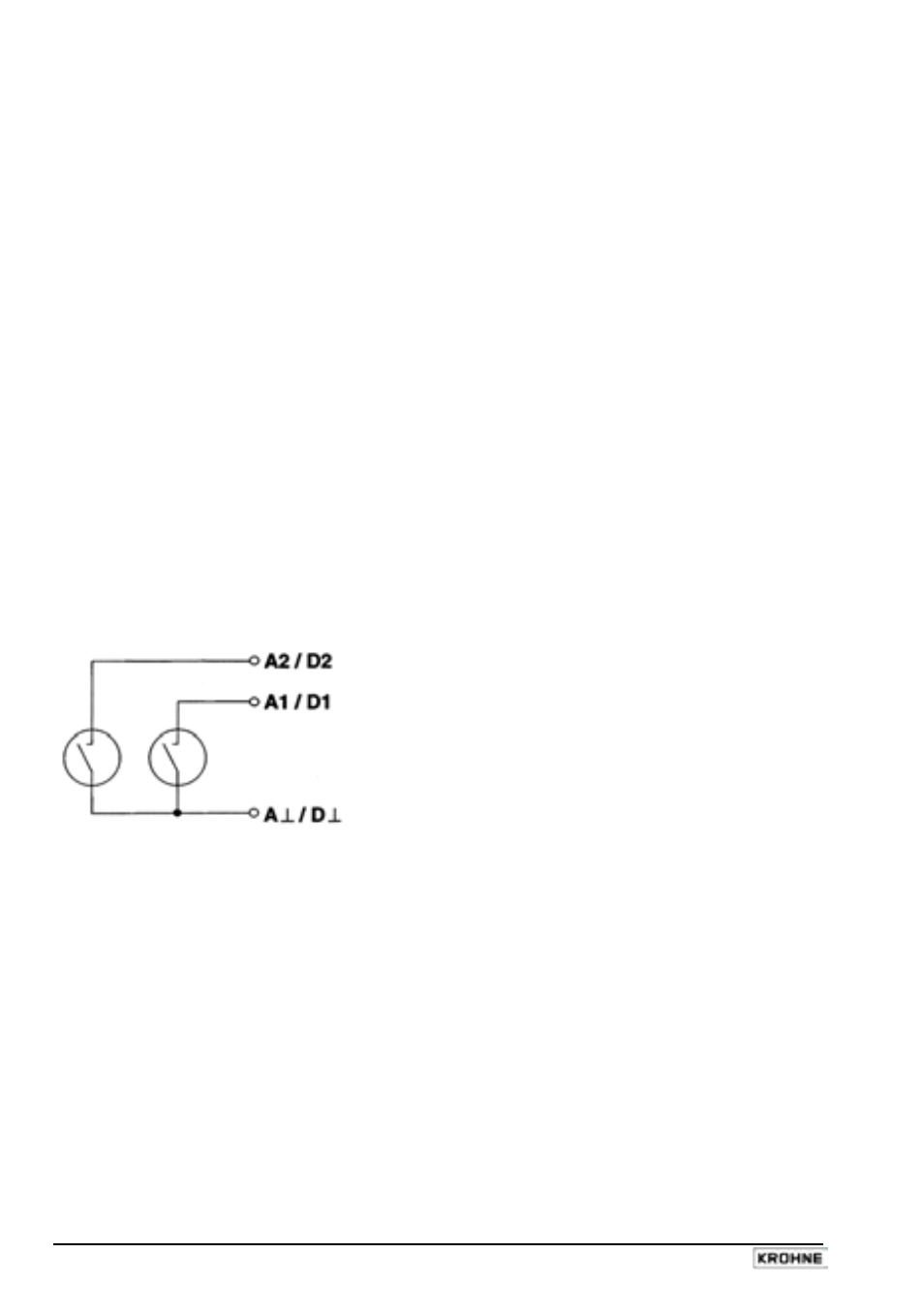
• Schematic wiring diagram for status outputs A1/A2 and D1/D2.
This status outputs have MOSFET switches as outputs which switch direct and alternating
voltages similar to relay contacts.
2.5
Control inputs C1 and C2
• Control inputs C1 and C2 are electrically connected (common centre grounding
contact C
⊥) but electrically isolated from all other circuits.
• Setting data and functions can note down in the Table in Sect. 3.
Please also refer to Section 2.7 ”Standard factory settings”.
• All operating data and functions are adjustable, see Sections 4.4 and 5.9, Fct. 1.11-1.12.
• Active mode:
uses the internal power supply, terminals E+/E-
Passive
mode: requires external power supply, U
ext
≤ 32V DC/24V AC, I ≤ 10mA
• The following operating conditions can be initiated using the control inputs:
- external range change
- holding of output values
- zeroing the outputs
- resetting the internal totalizer
- resetting (deleting) the error messages
• Connection diagrams see Section 2.6