Tl c v cos, Ч − ч, Vc v cos – KROHNE UFM 3030 Service EN User Manual
Page 47
UFM
3030
47
12 Ultrasonic
measurement
principle
12.1 Transit time differential method
UFM 3030 operates just like all KROHNE ultrasonic flow meters by the transit-time differential
method. This measuring principle is based on a simple physical fact. Imagine two canoes crossing a
river diagonally, one with the flow and one against the flow. Naturally the canoe that is travelling with
the flow will reach the opposite side sooner that the canoe that is travelling upstream. Acoustic
signals behave in a comparable way.
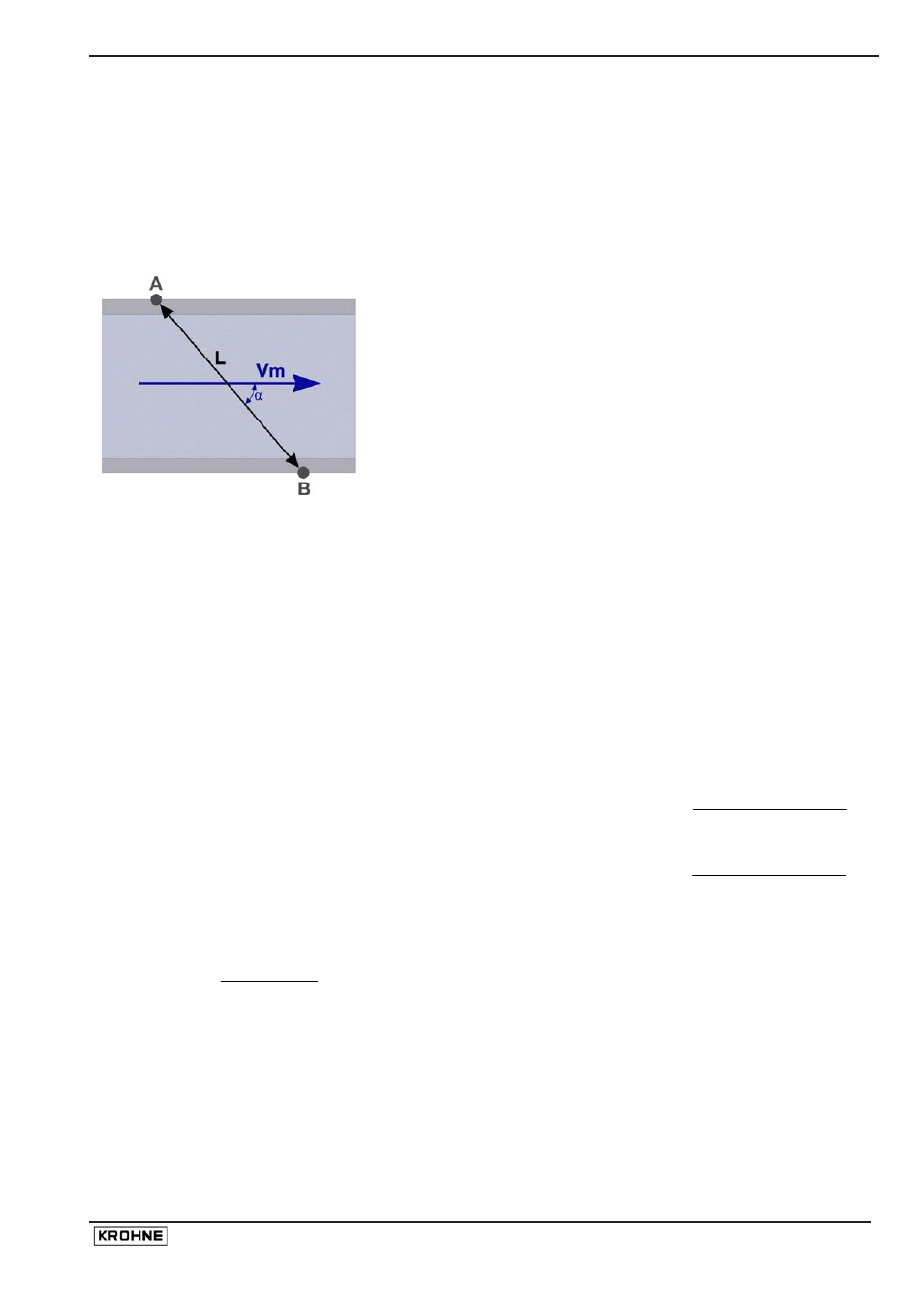
L= acoustic path length
Vm = flow velocity of the medium
By means of ultrasonic sensors in the UFM 3030 the transit
time of acoustic signals that travel upstream and downstream
are measured. The difference in transit time is proportional to
the mean flow velocity and is transformed into an output
signal by the electronics.
The three measuring beams in a UFM 3030 make a three-
dimensional cross section of the medium that flows through
the measuring tube. These measuring lines are positioned
that the influence of the flow profile (laminar or turbulent) are
largely reduced. Combined with the use of the latest signal
processing techniques (DSP) this results in a stable and
reliable measurement.
12.2 Three beam ultrasonic measurement
The flow velocity measurement of the 3-beam ultrasonic flow meter is based on measurement at
three positions in the measuring tube. Two of the acoustic beams are located in symmetrical
arrangement on the outside and the third beam is located in the centre of the measuring tube.
Each individual acoustic path of measurement forms an angle
ϕ
with the tube centerline.
The ultrasonic waves travel from point A to point B at speed
v
c
v
cos
AB
0
m
=
+
×
ϕ
and, conversely, from point B to point A at speed
v
c
v
cos
BA
0
m
=
−
×
ϕ
The following applies to the transit times from points A to B :
t
L
c
v
cos
AB
0
m
=
+
×
ϕ
and from point B to A
t
L
c
v
cos
BA
0
m
=
−
×
ϕ
t
AB
and t
BA
are measured continuously. The mean flow velocity Vm of the product is calculated using
the last two equations:
v
GK
t
t
t
t
m
BA
AB
AB
BA
=
Ч
−
Ч
A Transmitter
and
receiver
B Transmitter
and
receiver
L
Acoustic path, distance between ultrasonic sensors
vm
Average flow velocity of fluid
t
AB
(v
AB
)
Time of travel (propagation speed) of sound waves from points B to A
c
0
Sound velocity in the medium (fluid)
GK Calibration
constant
ϕ
Angle between tube center line and line of measurement