Instalación, A-8 conexión de la interfaz robótica – Lincoln Electric IM703 PRECISION TIG 375 User Manual
Page 15
A-8
INSTALACIÓN
PRECISION TIG 375
A-8
CONEXIÓN DE LA INTERFAZ ROBÓTICA
La interfaz Rob
ó
tica se puede hacer en el Recept
á
culo
Remoto (Vea la p
á
gina B-2 de la Secci
ó
n de
Operaci
ó
n.) La m
á
quina se env
í
a con el circuito del
recept
á
culo remoto internamente conectado al recep-
t
á
culo J5 de la tarjeta de Control para la operaci
ó
n
est
á
ndar del Control de Pie o Manual. A fin de habili-
tar el recept
á
culo remoto para la interfaz rob
ó
tica, su
enchufe de conexi
ó
n debe ser removido de J5 a J5A
en la tarjeta de Control. (Consulte el Diagrama de
Cableado de la m
á
quina.)
La interfaz rob
ó
tica funciona con la Precision TIG
establecida en el modo TIG
ó
VARILLA, pero debe
estar en la posici
ó
n de interruptor REMOTE para que
la Interfaz de Control Preestablecida funcione.
Cuando se est
á
en la posici
ó
n REMOTE con la inter-
faz rob
ó
tica, ninguno de los controles SALIDA
M
Á
XIMA o SALIDA M
Í
NIMA del panel limitan la config-
uraci
ó
n de control de la interfaz dentro de los l
í
mites
del rango de salida nominal de la m
á
quina.
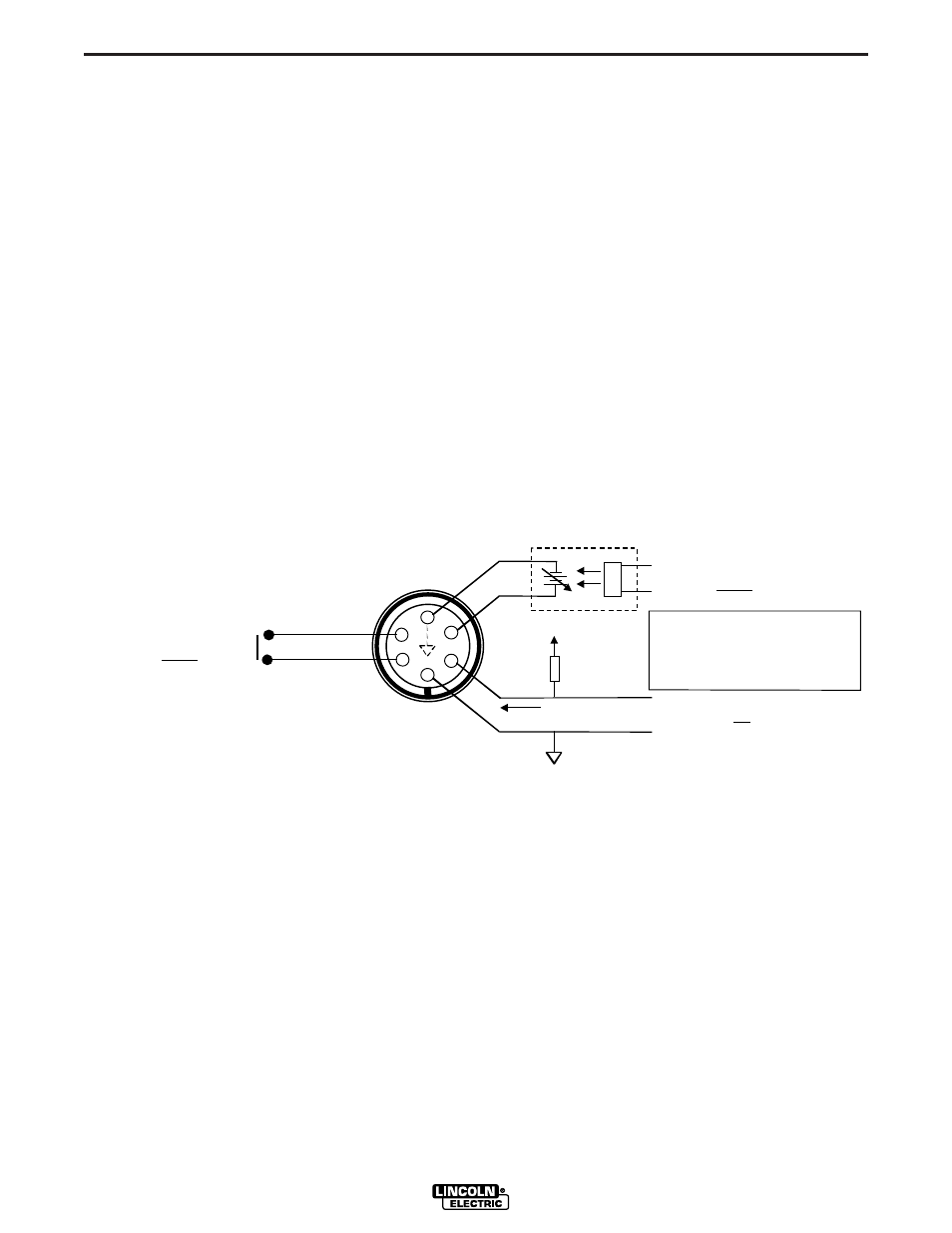
El diagrama en la Figura A.4 a continuaci
ó
n muestra
las conexiones del enchufe del recept
á
culo remoto y
se
ñ
ales para la interfaz rob
ó
tica:
+V
CC
= 70Vcd m x .
R = V
CC
/ 5ma
5ma
Com n
Rob tico
A
B
C
D
E
F
RECEPT CULO REMOTO
(Vista Frontal )
Para Enchufe 18-12P
(LECO S12020-27)
INICIO DEL ARCO
ENTRADA DE ROBOT
(interruptor de 18Vca, 10ma)
*
+
CONTROL PRESTABLECIDO
ENTRADA DE ROBOT
(0 -10Vcd = Rango de Salida Nominal)
ARCO ESTABLECIDO
SALIDA A ROBOT
(Alto = No Soldadura)
(Bajo = Soldadura)
*
Com n de Control de la
Precision TIG.
Nota : El cable de conexi n de interfaz
puede captar ruido de interferencia.
Tal vez sean necesarios circuitos de
derivaci n/filtraci n adicionales para los
circuitos externos.
FIGURA A.4