KB Electronics KBRG-212D User Manual
Page 17
17
6.9 Signal Following – In this mode, a signal source is used to vary motor speed.
6.9.1 Voltage Following – Uses a voltage source to vary motor speed. Set J17
(See Section 7.7 on page 22 for jumper information) to “VOLT” position and
connect the voltage source to TB1 terminals SIG (+) and COM (-) (See
Figures 7A below and 7C, on page 18), Voltage Following Connection. Be
sure the positive (+) signal is connected to “SIG” terminal and the negative
(-) is connected to the “COM” terminal. When a 0V DC signal is applied, the
motor will operate at the minimum set speed (set by the MIN Trimpot). When
a 10V DC signal is applied, the motor will operate at the maximum set speed
(set by the MAX Trimpot).
6.9.2 Current Following – Uses a current source to vary motor speed. Set J17
(See Section 7.7 on page 22 for jumper information) to “CUR” position and
connect the current source to TB1 terminals SIG (+) and COM (-). See
Figures 7B below, and 7D, on page 18.
In addition, the control is used to isolate, amplify, and condition DC voltage
signals from any external source (power supplies, motors, tachometer
generators, transducers, and potentiometers). Also provides isolation for
motor direction, switching and an isolated power supply for transducer or
potentiometer operation. See Section 7.7, on page 22.
Notes:
1. Jumper J8 must be in the “10V” position.
2. A positive signal with respect to the COM terminal will produce a positive
output to motor. A negative signal with respect to the COM terminal will
produce a negative output. A 0 to ±10VDC is required to operate control
from 0 to ± full output. Jumper J8 must be set to the 10V position.
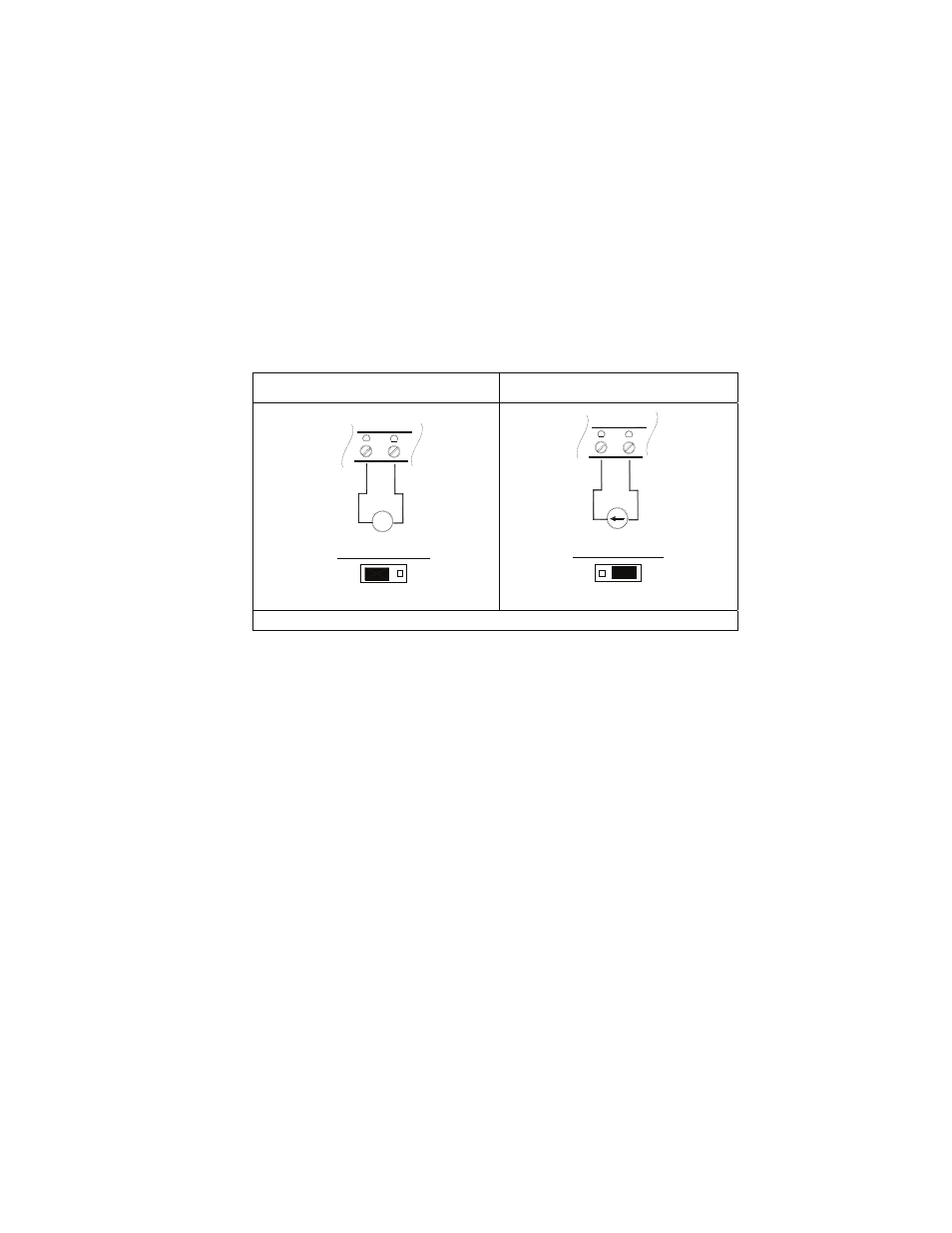
FIGURE 7A – VOLTAGE FOLLOWING
(DEFAULT)
FIGURE 7B – CURRENT FOLLOWING
±
10 VDC
SIG (+) COM (-)
~
TB1
J17
VOLT CUR
SIG (+) COM (-)
4 - 20mA
TB1
VOLT CUR
J17
See Table 6, for Torque Requirements.