CONTREX CX-1010 User Manual
Page 49
Page 47
Run has the fourth highest operating priority. Run is the primary operating state. Setpoint Mode (CP-102)
determines the mode of operation for Run, using either the master mode, the follower mode, the direct mode
or the custom setpoint mode. The corresponding setpoint for the selected mode determines the operating
speed. RUN Loop Mode (CP-220) determines the control loop that is used during Run. At times, the
selected RUN Loop Mode is overridden. The direct mode will only operate in an open loop. The master
mode and the custom setpoint mode will “Run” in velocity loop if the RUN Loop Mode (CP-220) is set to
either “ZE Pos” or “Pos”. Therefore, the follower mode is the only mode that can “Run” with the “ZE Pos”
or the “Pos loop”.
With the exception of the direct mode, the acceleration and deceleration ramps for the modes of operation are
determined by Acl Tm RUN, (CP-201), Dcl Tm RUN (CP-203) and Ref RUN Rmp (CP-200). The direct
mode ramps are determined by Acl Tm Drct (CP-206), Dcl Tm Drct (CP-208) and Ref Drct Rmp (CP-205).
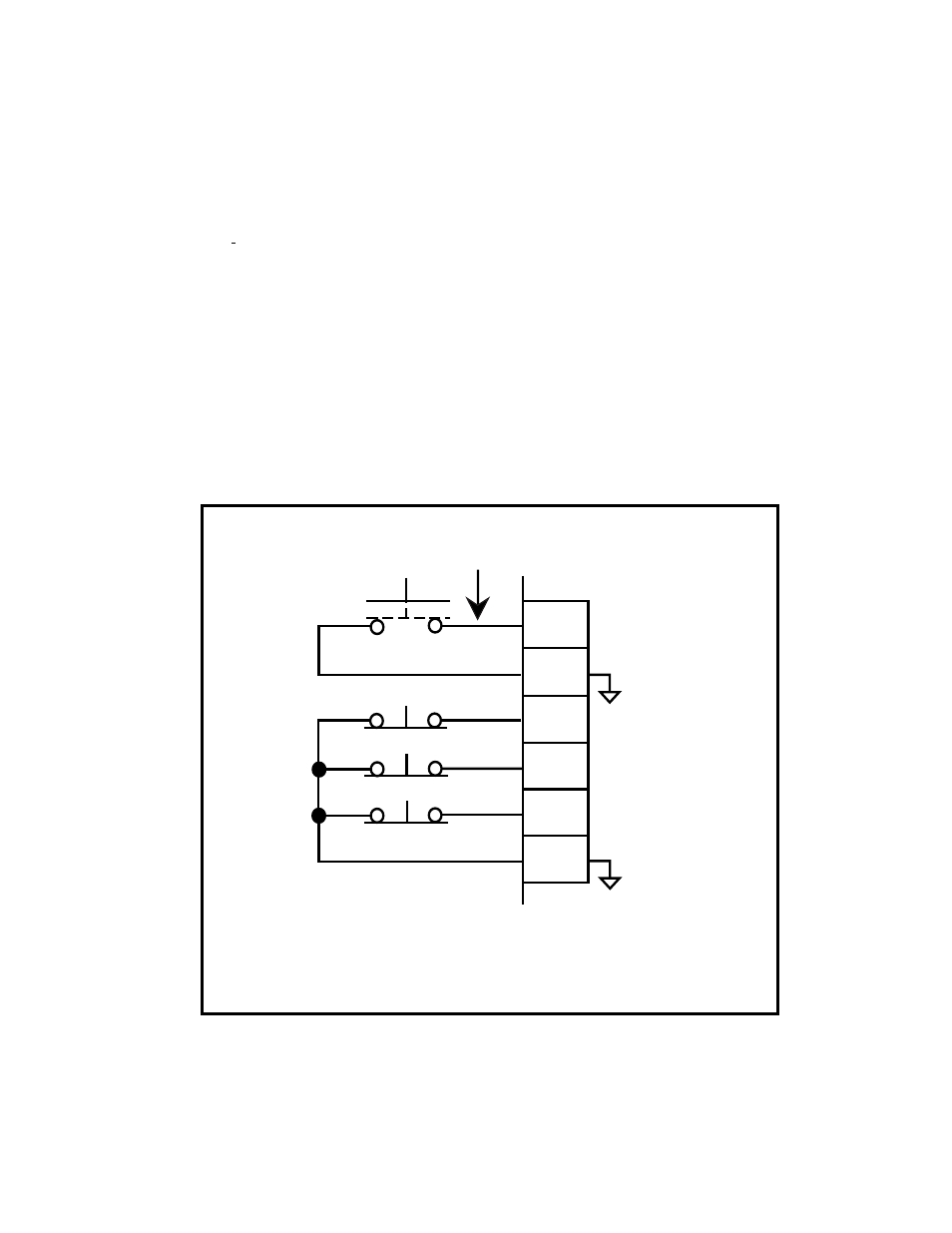
To activate Run:
• Activate Low (closed to common), Level Sensitive, Latched
• Use momentary contact - does not need to be maintained to remain active
RUN
COMMON
F-STOP
R-STOP
H-STOP
COMMON
RUN
Close Momentarily
5
8
1
2
4
3
J6
R-STOP
H-STOP
F-STOP
Figure 46 Run Input