English – Burkert Type 8625 User Manual
Page 33
8625-2 Standard - 31
english
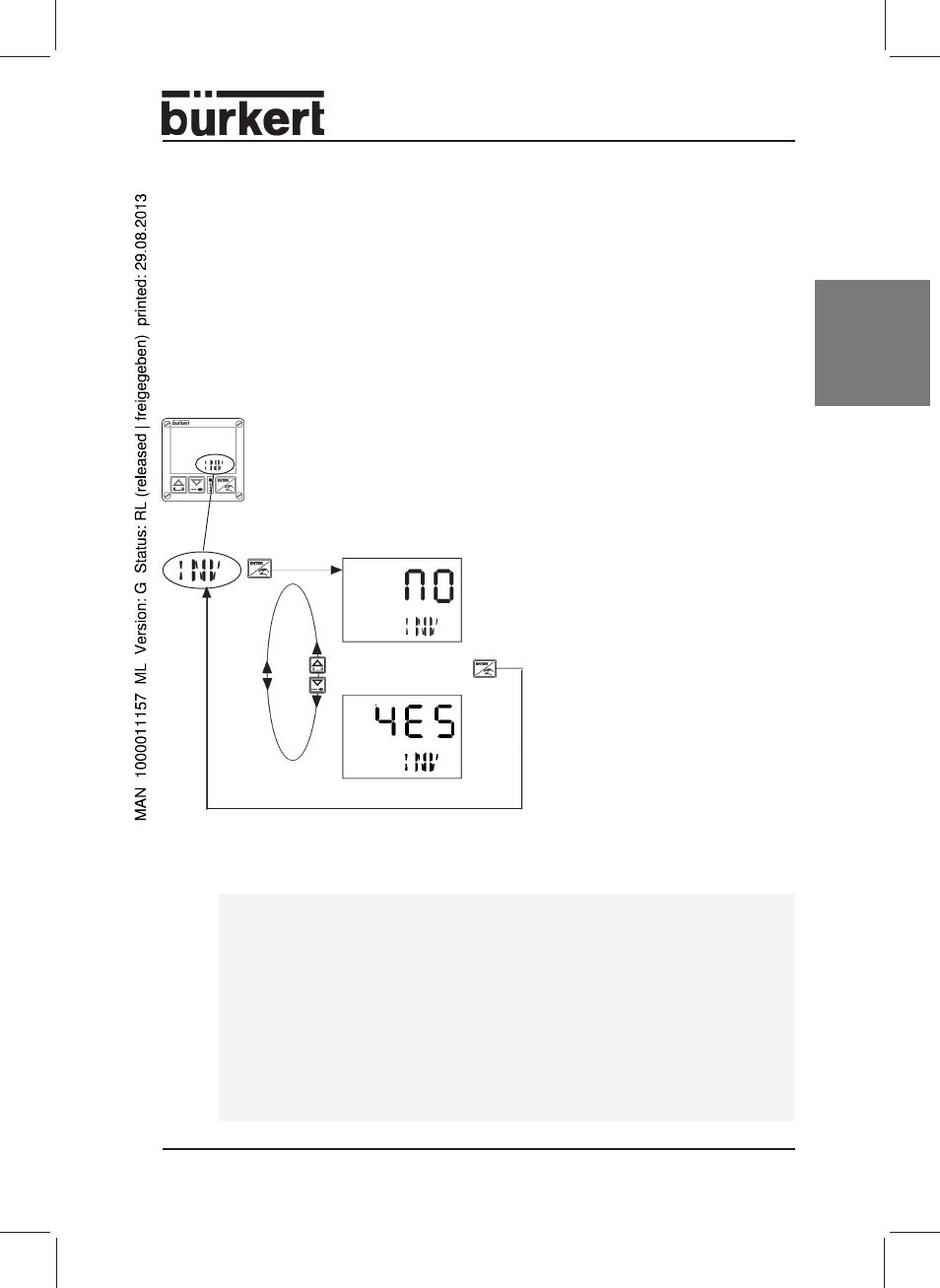
6.6.6
INV - heating (non-inverted control)/cooling
(inverted control)
Heating (non-inverted control):
NO
Output signal y of the PI controller
increases with increasing positive
control difference x
d
= w-x.
Cooling (inverted control):
YES
Output signal Y of the PI controller
increases with increasing negative
control difference x
d
= w-x.
Example of applications:
Heating: : In the case of „heating“, a warmer fluid is added to a fluid flow by
means of a proportional valve. The temperature of the mixed fluid is measured
and the addition of the warmer fluid controlled.
Cooling: In the case of „cooling“, a cooler fluid is added to a fluid flow by
means of a proportional valve. The temperature of the mixed fluid is measured
and the addition of the cooler fluid controlled.
Î Via this function you set the sense of action between the input signal and
the setpoint of the valve (factory setting: NO).
non-inverted control
y = K
p
(x
d
+ T
A
/T
N
∑ x
d
)
inverted control
y = - K
P
(x
d
+ T
A
/T
N
∑ x
d
)
Fig.: Heating (non-inverted control)/cooling (inverted control)