English, Rules for adjusting pi controllers – Burkert Type 8623 User Manual
Page 35
8623-2-Standard - 33
english
The literature on control technology contains a number of rules by which a
favourable setting of the controller parameters can be determined experimentally.
In order to avoid incorrect settings, the conditions under which the rules were set
up in each case must be kept in mind. Apart from the characteristics of the
controlled member and the controller itself, it makes a difference whether a
change in disturbance or a command variable is to be compensated.
Adjustment rules of Ziegler and Nichols (oscillation method)
With this method, the controller parameters are set on the basis of the behaviour
of the control loop at the limit of stability. These parameters are initially set such
that the control loop begins to oscillate. Critical characteristic values occurring
allow one to deduce a favourable setting of the control parameters. A prerequisite
for using this method is naturally that the control loop is permitted to oscillate.
Procedure:
•
Set the controller to P control (i.e. T
N
= 200 s), K
p
initially small.
•
Set the desired set point.
•
Increase K
P
until the controller output executes continuous, undamped
oscillation.
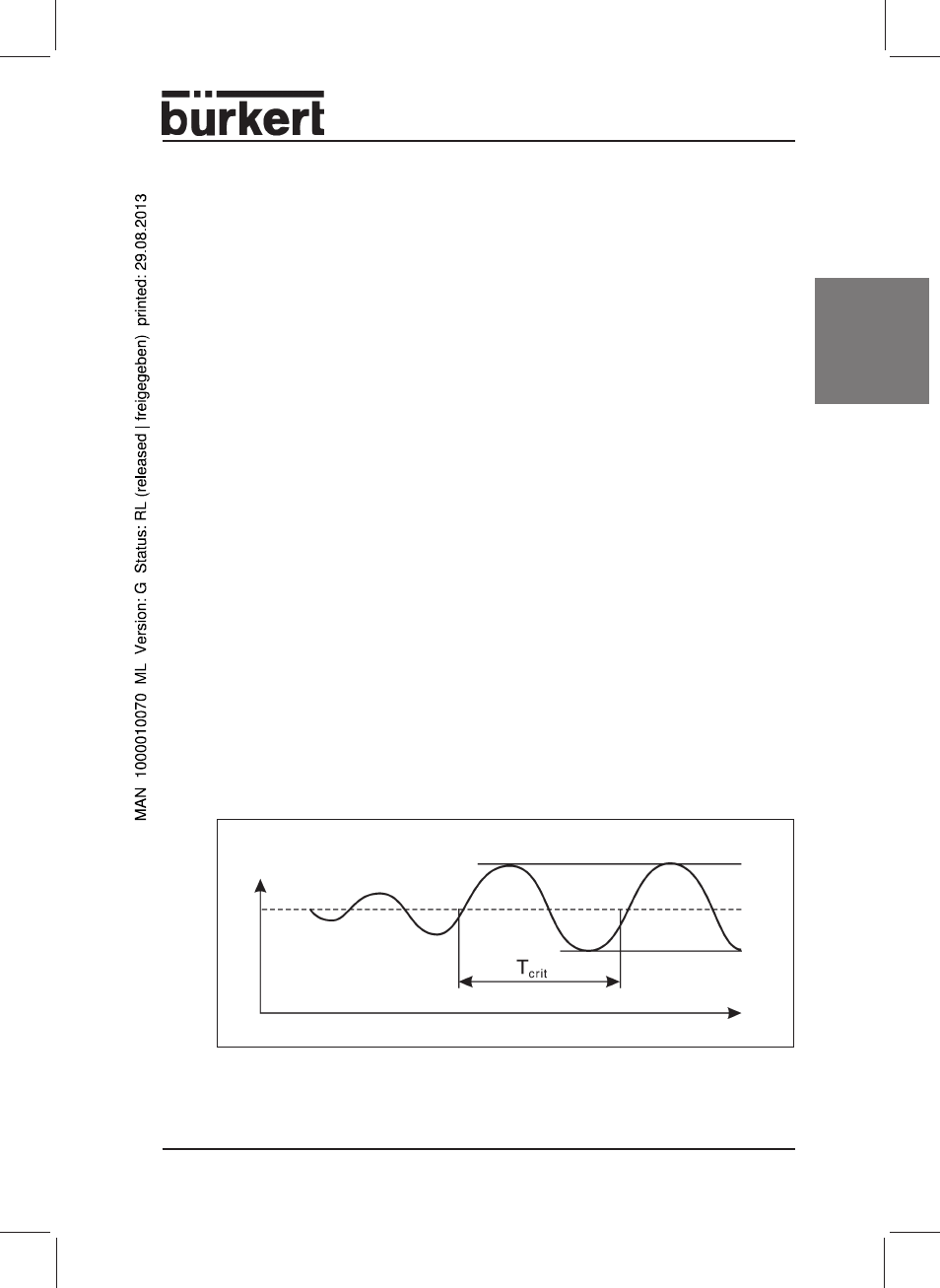
The proportionality index (amplification factor) set at the limit of stability is
designated K
crit
. The resulting oscillation period is designated T
crit
.
Rules for adjusting PI controllers
Curve of controller output at the limit of stability
time
actual value