English – Burkert Type 8623 User Manual
Page 34
32 - 8623-2 Standard
english
1
Ti
Characteristic and step response of the P fraction of a PI controller
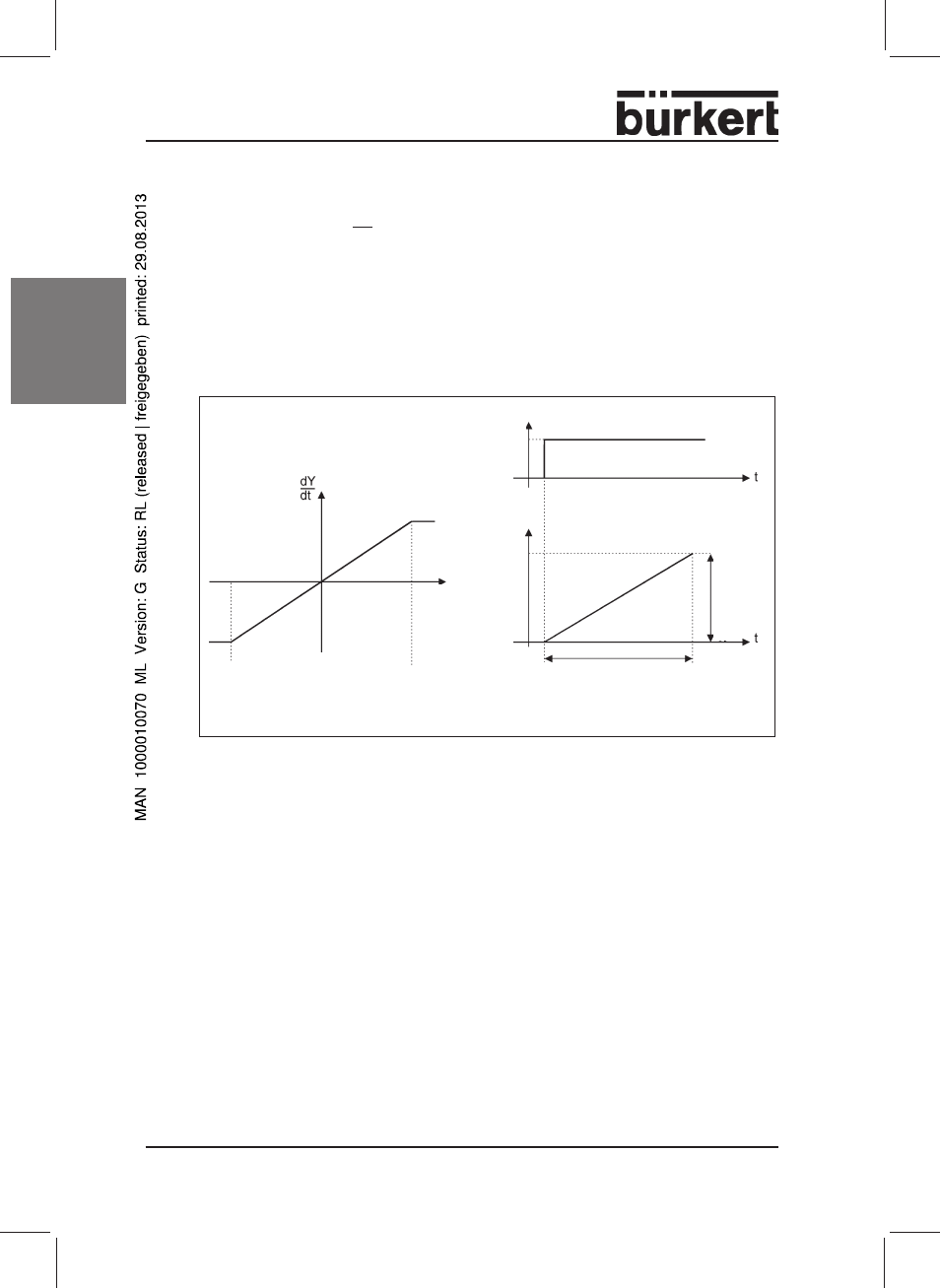
I fraction:
Function:
y =
∫
∫
∫
∫
∫
x
d
dt
T
i
is the integration or floating time. It is the time that expires until the controller
output has run through the entire correcting range.
Characteristics
A purely I controller completely eliminates the effects of disturbances. It thus has a
favourable static behaviour. Because of its finite correcting speed, it works more
slowly than a P controller and tends to oscillation. It is hence dynamically relatively
unfavourable.
Superimposing the P and I fractions:
With a digital controller with sampling time T
A
and noting that T
i
= K
p
/T
N,
one can
write:
y = K
p
(x
d
+ T
A
/T
N
∑
∑
∑
∑
∑
x
d
)
y :
controller output
K
p
:
amplification factor
x
d
:
deviation (x
d
= w - x)
T
A
:
sampling time
T
N
:
reset time
Characteristic
Step response
control range
∆
x
c
correcting range
∆
y
floating time T
i
y
max
x
d
y
min
x
d
x
- Type 1062 (112 pages)
- Type 1050 (4 pages)
- Type 8750 (64 pages)
- Type 8750 (82 pages)
- Type 8681 (40 pages)
- Type 8681 (90 pages)
- Type 8798 (2 pages)
- Type 8791 (4 pages)
- Type 8798 (106 pages)
- Type 8718 (34 pages)
- Type 8792 (118 pages)
- Type 8791 (15 pages)
- Type 8792 (136 pages)
- Type 8792 (252 pages)
- Type 8791 (21 pages)
- Type 8791 (154 pages)
- Type 8791 (106 pages)
- Type 8791 (184 pages)
- Type 8791 (28 pages)
- Type 0911 (76 pages)
- Type 0911 (46 pages)
- Type 0911 (64 pages)
- Type 0911 (84 pages)
- Type 1058 (31 pages)
- Type 1060 (4 pages)
- Type 1066 (112 pages)
- Type 1067 (158 pages)
- Type 1077-2 (33 pages)
- Type 1094 (12 pages)
- Type 1094 (41 pages)
- Type 1094 (82 pages)
- Type 1094 (126 pages)
- Type 1115 (25 pages)
- Type 1150 (99 pages)
- Type 1541 (2 pages)
- Type 5142 (6 pages)
- Type 8619 (40 pages)
- Type 8619 (134 pages)
- Type 8620 (177 pages)
- Type 8622 (4 pages)
- Type 8623 (90 pages)
- Type 8625 (118 pages)
- Type 8624 (124 pages)
- Type 8718 (254 pages)