Receive messaging, See the, For details o – MoTeC ADR User Manual
Page 21
ADR Functionality User Manual
ADR Functional Reference
Receive Messaging
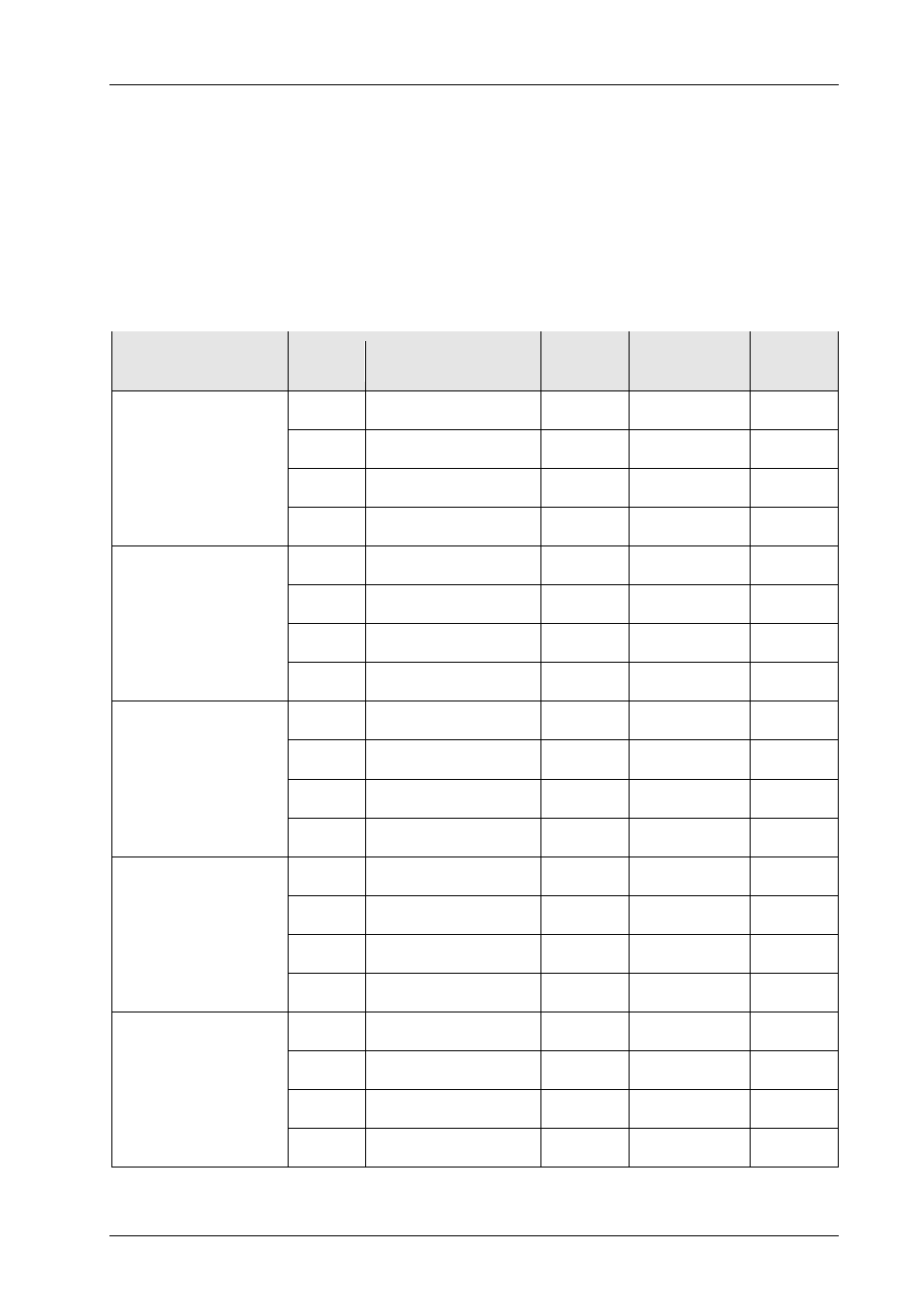
The ADR receives up to five CAN messages starting at the user configured Receive Address.
During an event, the data in the received CAN messages is logged as 20 individual 16bit channels at 100Hz. These
logged channels are included in the log files generated by ADR Manager.
If the CAN connection is lost, the last received values continue to be logged.
The channels are labelled and scaled in the log file with the following channel names and scaling:
CAN Address
Bytes
Name
Units
Scaling of 16bit
data
Decimal
places
Receive Address
(default 0x440)
0:1 Engine
Speed
Rpm Data*6 0
2:3
Throttle Pedal Position
%
Data / 10
1
4:5
Brake Pressure Front
kPa
Data * 1
0
6:7
Brake Pressure Rear
kPa
Data * 1
0
Receive Address + 1
0:1
Wheel Speed FL
Km/h
Data / 10
1
2:3
Wheel Speed FR
Km/h
Data / 10
1
4:5
Wheel Speed RL
Km/h
Data / 10
1
6:7
Wheel Speed RR
Km/h
Data / 10
1
Receive Address + 2
0:1
Steering Angle
deg
Data / 10
1
2:3
Steering Position
mm
Data / 100
2
4:5
User 1
Data * 1
0
6:7
User 2
Data * 1
0
Receive Address + 3
0:1
User 3
Data * 1
0
2:3
User 4
Data * 1
0
4:5
User 5
Data * 1
0
6:7
User 6
Data * 1
0
Receive Address + 4
0:1
User 7
Data * 1
0
2:3
User 8
Data * 1
0
4:5
User 9
Data * 1
0
6:7
User 10
Data * 1
0
MoTeC — Published: 11 February 2014
Page 20