Can bus, Transmit messaging, See the – MoTeC ADR User Manual
Page 20: Section
ADR Functionality User Manual
ADR Functional Reference
CAN Bus
The CAN bus is used for:
• Configuration, firmware upgrade and event download through ADR Manager.
• Transmission of ADR status.
• Receiving external channels to be stored in the event log.
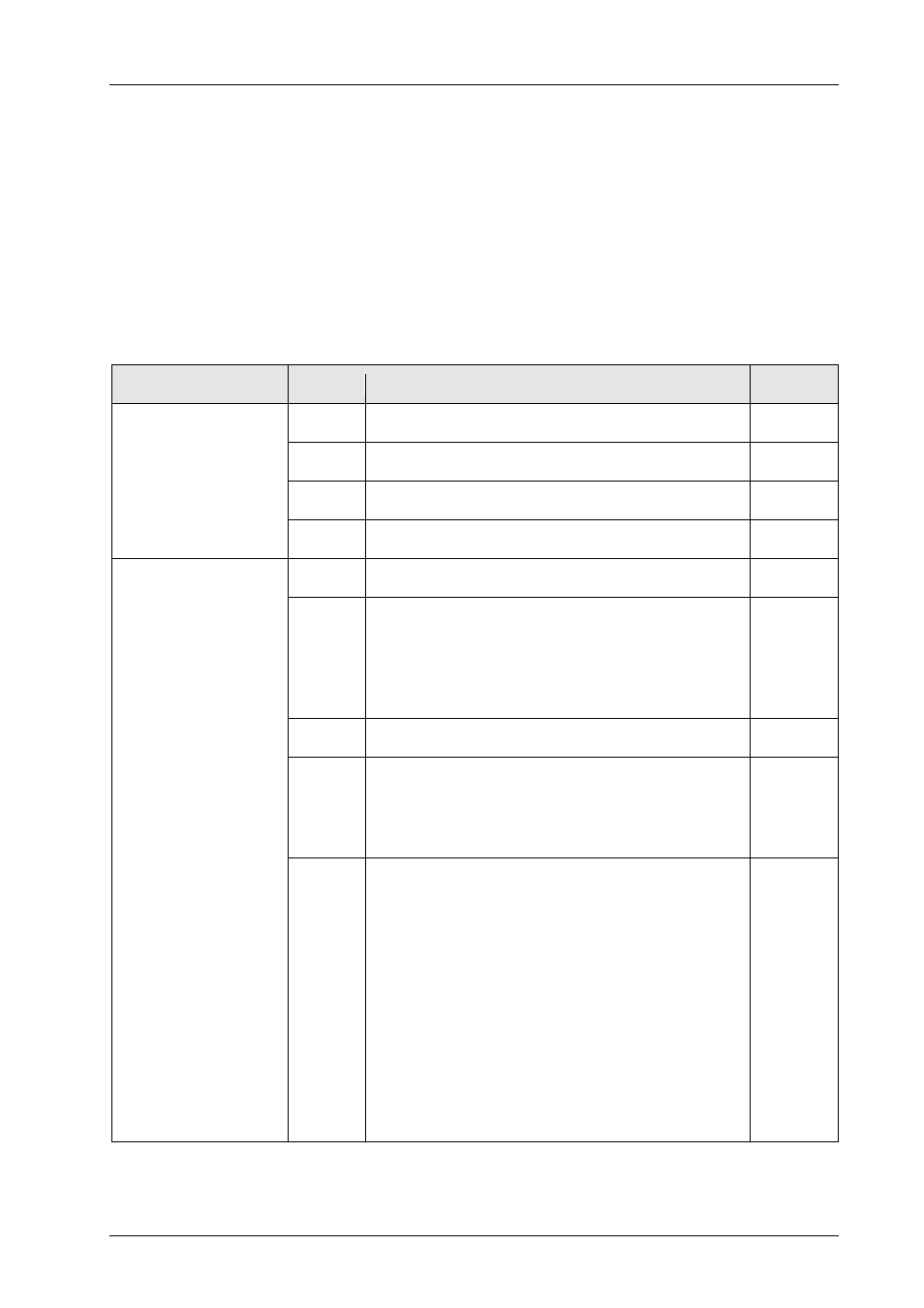
Transmit Messaging
There are two status messages transmitted from the ADR at 50Hz on user configurable CAN Ids:
CAN Address
Bytes
Description
Units
Transmit Address
(default 0x448)
0:1 X
axis
0.1G
2:3 Y
axis
0.1G
4:5 Z
axis
0.1G
6:7 Battery
voltage
mV
Transmit Address + 1
0
Number of logged events
1
Event status bits:
0x01 Event in progress
0x02 Events logged
0x04 Severe Event logged
0x08 Event Log full
2
Supercapacitor charge level
1%
4:5 Diagnostic
Bits:
0x0001 GPS data invalid
0x0002 GPS timed out
0x0004 CAN receive timed out
6:7 Fault
Bits:
0x0001 Corrupt calibration
0x0002 Corrupt or invalid configuration
0x0004 Accelerometer self-test failed
0x0008 Logging memory test failed
0x0010 External LED open circuit
0x0020 Oscillator failed
0x0100 Voltage rail fault (2.3V rail)
0x0200 Voltage rail fault (5.5V rail)
0x0400 Voltage rail fault (3.0V rail)
0x0800 Voltage rail fault (5V rail)
0x1000 Voltage rail fault (5V CAN rail)
0x2000 Voltage rail fault (5V external rail)
MoTeC — Published: 11 February 2014
Page 19