National Instruments NI MATRIXx Xmath User Manual
Page 78
Chapter 4
Frequency-Weighted Error Reduction
4-8
ni.com
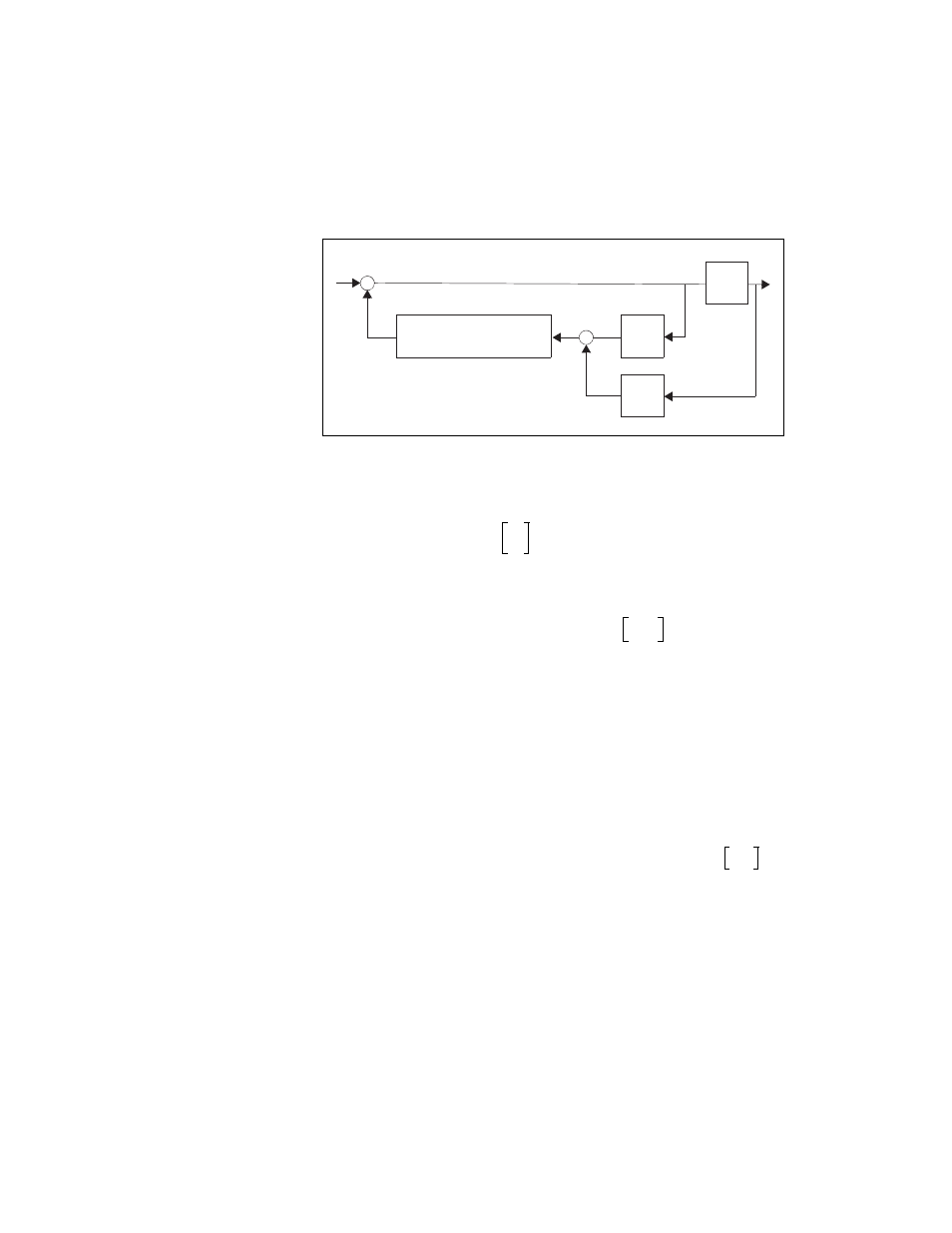
The left MFD corresponds to the setup of Figure 4-3.
Figure 4-3. C(s) Implemented to Display Left MFD Representation
The setup of Figure 4-2 suggests approximation of:
whereas that of Figure 4-3 suggests approximation of:
In the LQG optimal case, the signal driving K
E
in Figure 4-2 is white noise
(the innovations process); this motivates the possibility of using no
frequency dependent weighting in approximating G(s) [but observe that
after approximating, the signal will no longer be white noise, so that
argument is questionable]. Simple appeal to duality motivates using no
frequency dependent weighting for H(s). These are two of the options
offered by
fracred( )
.
Two more
fracred( )
options depend on examining stability robustness
(the options are duals of one another). From the stability point of view, the
set-up of Figure 4-3 is identical to that of Figure 4-4, with
.
K
r
sI
A
K
E
C
+
–
(
)
1
–
K
E
B
P s
( )
+
-
G s
( )
K
r
C
=
sI A
–
BK
r
+
(
)
1
–
K
E
H s
( )
K
R
sI A
–
K
E
C
+
(
)
1
–
B K
E
=
Pˆ
P I
=