Pioneer 2 User Manual
Page 56
Appendix A: Microcontroller Ports and Connections
50
Note that the general-purpose I/O and analog-to-digital ports are shared with the onboard bus (below)
and four-motors (Appendix B) circuitry, respectively, and may not be available for use on all robots.
In particular, lines P2_3-6 are for controlling the additional two motors in the Pioneer AT. The analog lines
P5_4-7, although not used by any Pioneer 2 configuration, are connected to and may be used for additional
encoders in four-wheel drive Pioneer 2s. The digital I/O lines P3_0-7 are included in the I/O bus.
In addition, four of the A/D ports and the PWM ports are shared with digital input and output lines,
respectively.
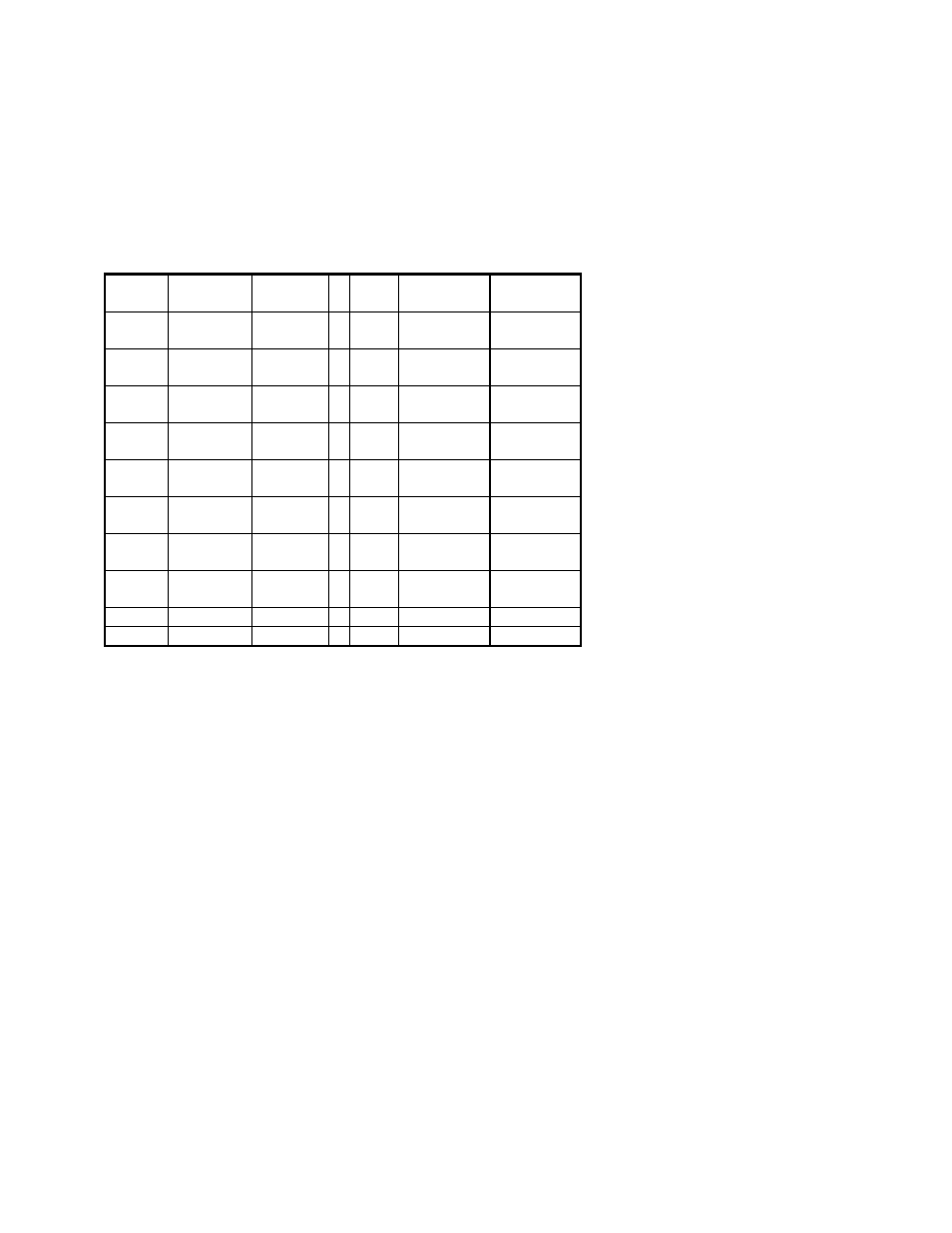
Table A-4. User I/O Expansion Port
Pin #
Label
Use
Pin
#
Label
Use
1
P2_12
OD0 or
PWM #1
2
P3_0
ID0
3
P2_13
OD1 or
PWM #2
4
P3_1
ID1
5
P2_14
OD2 or
PWM #3
6
P3_2
ID2
7
P2_15
OD3 or
PWM #4
8
P3_3
ID3
9
P5_4
ID4 or
A/D #1
10
P3_4
OD4
11
P5_5
ID5 or
A/D #2
12
P3_5
OD5
13
P5_6
ID6 or
A/D #3
14
P3_6
OD6
15
P5_7
ID7 or
A/D #4
16
P3_7
OD7
17
P5_9
A/D #0/5
18
Vcc
<100ma
19
Vpp
<100ma
20
Gnd
The General I/O Bus
The 34-pin IDC socket on the Pioneer 2 provides a general-purpose I/O bus (Table A-5), containing:
Ÿ 8 read/write data lines (D0-7)
Ÿ 4 chip select lines (CS_2-5)
Ÿ 2 address lines (A0, A1)
Ÿ Read (RD#) and write (WR) lines
Ÿ 8 general-purpose digital I/O (P3_0-7)
Ÿ 5 analog-to-digital input (A/D) (P5_4-7,9)
Ÿ 2 signal ground (Gnd)
Ÿ 2 Vcc (+5 VDC)
Ÿ 1 Vpp (+12 VDC)