Pioneer 2 User Manual
Page 25
Pioneer Mobile Robots
19
Engage Pioneer 2’s motors (white MOTORS button) after connecting with a client
or the robot won’t move, no matter how excited you get.
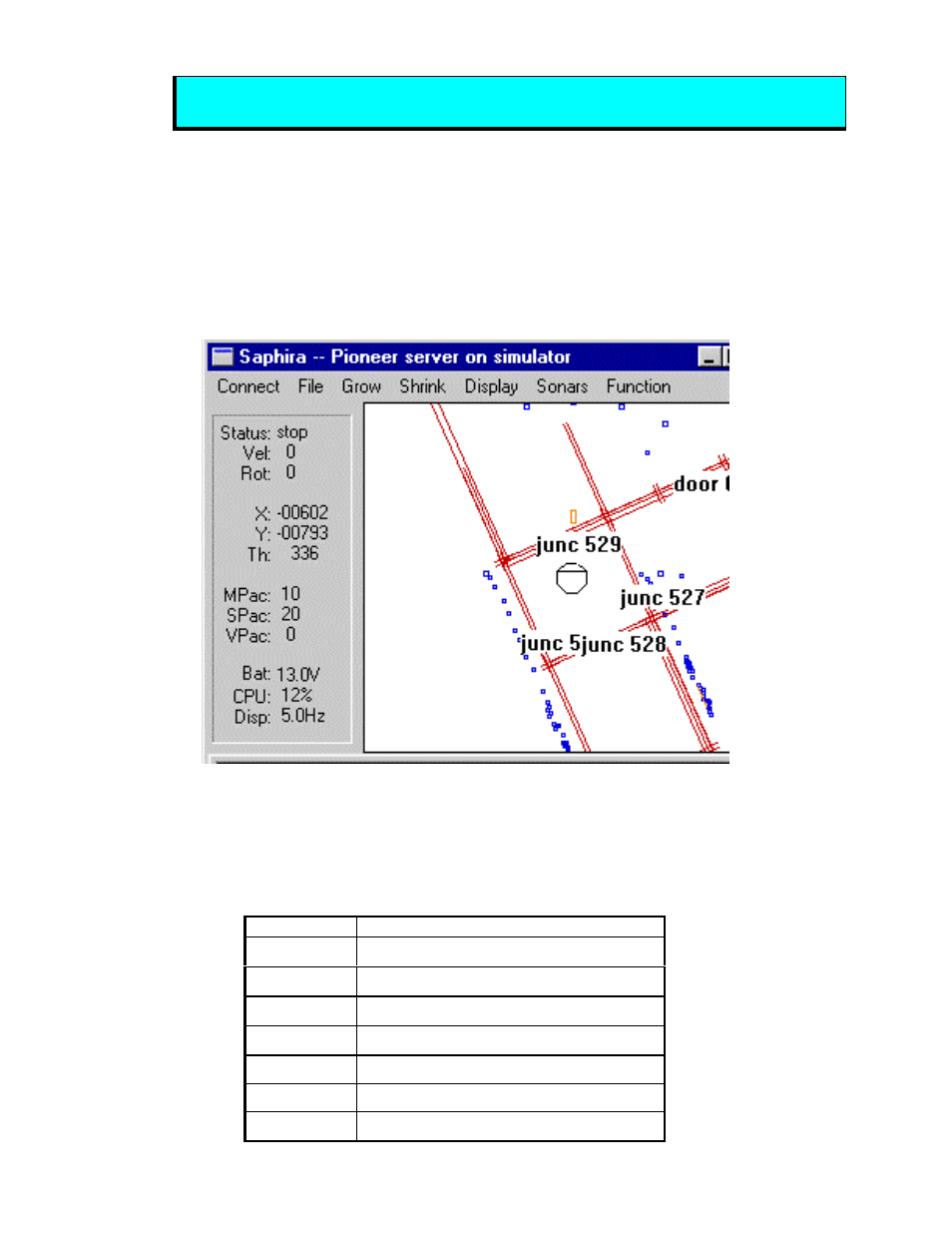
The main window of the Saphira client displays a sonar map built by Saphira as the Pioneer moves through
space. Landmarks may be defined so that Saphira will classify certain sensor data patterns, for example,
walls or openings.
In Figure 4-3, Pioneer (center octagon) has identified a corridor and several doors. Notice the small dots,
which are recent sonar reflections. The long lines through the sonar reflections are the calculated corridor’s
geometry. The rectangles directly ahead of the robot represent an obstacle “detected and of interest” to
Pioneer. One of Saphira’s behaviors, by the way, is to have Pioneer seek and traverse the center of a
corridor.
Figure 4-3. The main window of Pioneer’s Saphira client
You may enable and disable Saphira behaviors for Pioneer by selecting or deselecting them from menu
items in the Saphira client and from the client keyboard. These include manual drive operation and
disabling / enabling obstacle avoidance and constant velocity behaviors (Table 4-1).
Table 4-1. Keyboard-controlled behaviors
KEY
ACTION
i,
↑
Increment forward velocity
m,
↓
Decrement forward velocity
j,
←
Incremental left turn
l,
→
Incremental right turn
k, space
All stop
g
Constant velocity ON/OFF
c
Obstacle avoidance ON/OFF