Pioneer 2 User Manual
Page 35
Pioneer Mobile Robots
29
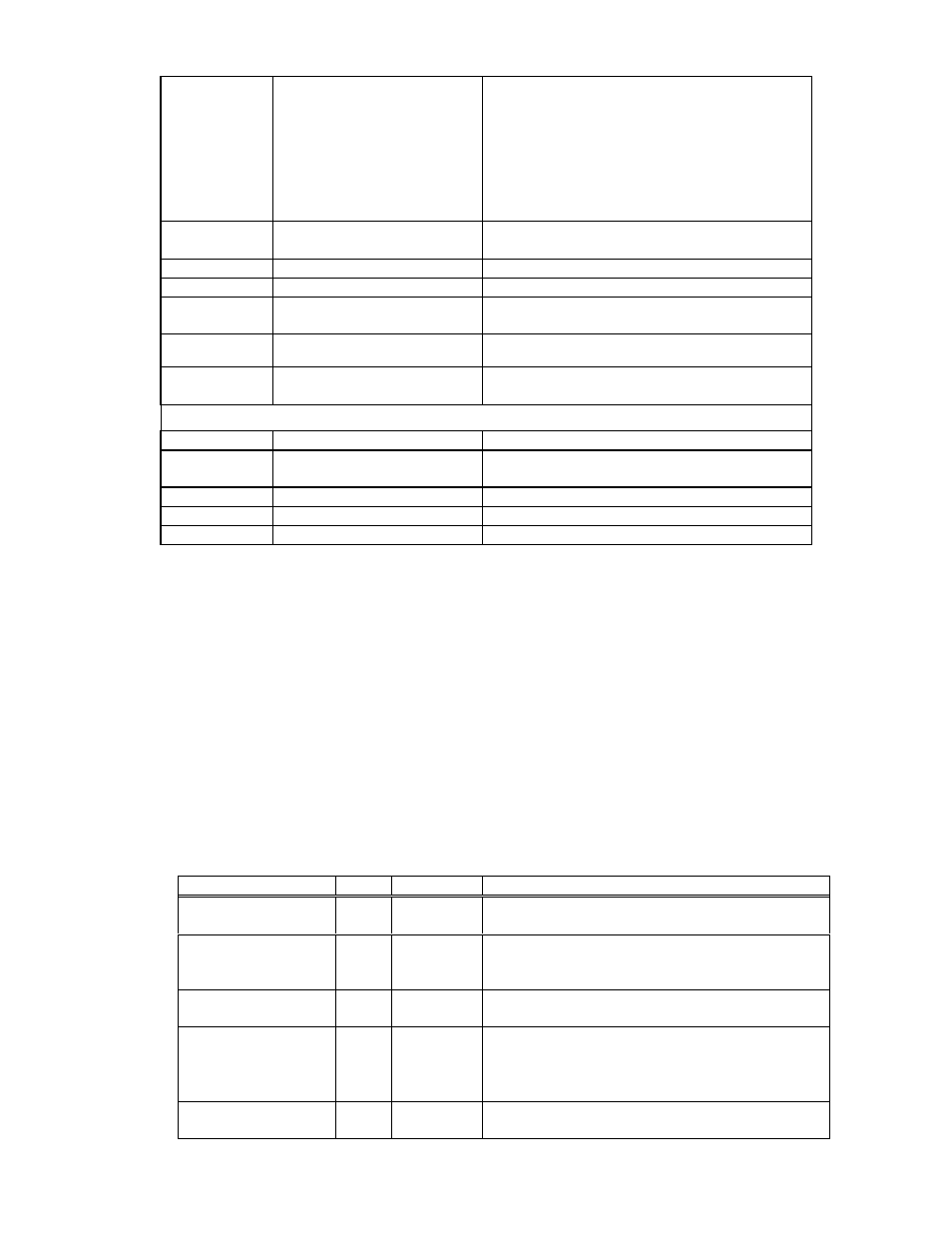
Bumpers
integer
Motor stall and bumper accessory indicators. Bit
0 of the lsbyte is the left wheel stall indicator =
1 if stalled. Bits 1-5 of that same byte
correspond to the bump switch states (1=on) for
the rear bumpers accessory. Bit 0 of the msbyte
is the right wheel stall; the bits 1-5 of that same
msbyte correspond to the front bumpers switch
states.
Control
signed integer
Setpoint of the server’s angular position servo—
multiply by
AngleConvFactor
for degrees
PTU
unsigned integer
Pulse width of position servo #1
Compass
byte
Compass heading in 2-degree units
Sonar
readings
byte
Number of new sonar readings included in
information packet; readings follow:
Sonar
number
byte
Sonar number
Sonar
range
unsigned integer
Sonar reading—multiply by
RangeConvFactor
for mm
…rest of the sonar readings…
Timer
unsigned int
Currently selected analog port number 1-5
Analog
byte
User analog input (0-255=0-5 VDC) reading on
selected port
Digin
byte
User digital input
Digout
byte
User digital output
Checksum
integer
Checksum (see previous section)
Factors refer to values in Saphira parameter file. See Appendix C.
To be fully compatible with the original PSOS and supporting clients like Saphira, the standard P2OS SIP
will not change. Newer versions of the P2OS SIP will be implemented as a different packet type.
Client Commands
P2OS implements a structured command format for receiving and responding to directions from a client for
control and operation of the robot or its simulator. The number of client commands per second you may
send depends on the serial baud rate and average number of data bytes per command. Do note that the
P2OS server may not be up to the task of managing a deluge of commands, so we recommend that you time
commands with the internal processing clock of the server, settable to either 100 milliseconds or 50
milliseconds per cycle with Pioneer 2. You may exceed those rates; just do it sparingly.
The client must send a command at least once every two seconds or so (
watchdog
parameter; see
Updating & Reconfiguring P2OS, Chapter 7); otherwise, the communication watchdog server will stop the
robot’s onboard drives.
Table 6-4. P2OS client command packet
Component
Bytes
Value
Description
Header
2
0xFA,
0xFB
Packet header; same for client and server
Byte Count
1
N + 2
Number of subsequent command bytes plus
checksum, not including Byte Count.
Maximum of 200 bytes.
Command
Number
1
0 - 255
Client command number;
see Table 4-4
Argument Type
(command
dependent)
1
0x3B or
0x1B or
0x2B
Required data type of command argument:
positive integer (
sfARGINT
),
negative integer or absolute value (
sfARGNINT
), or
string (
sfARGSTR
)
Argument
(command dependent)
n
data
Command argument; integer or string