H1000 pilot, Calibration, Seatrial calibration – B&G H1000 Autopilot User Manual
Page 62
h1000 pilot
calibration
Page 61
seatrial calibration
engaging the h1000 pilot
1.
Steer the boat onto a suitable heading and allow time for the boat to settle on this course.
2. Select
Compass Mode by repeatedly pressing the MODE key.
3. Press
the
ON key on any h1000 pilot display or hand-held controller.
4.
The autopilot will now be steering the boat on the selected heading.
5.
Alter course in multiple increments using the 10
q and rotary knob buttons on any h1000 pilot
display or hand-held controller.
Press the red OFF key to disengage the autopilot and return to manual steering.
setting the rudder amidships position
Due to hull design and steering characteristics, the best
rudder amidships position can only be set when underway
at normal cruising speed. Adjust the amidships position as
follows:
1.
Steer the boat into the wind and maintain a steady
course.
2.
Boats with twin engines must have the engine revs
balanced.
3.
Boats with trim tabs must have them in the normal
cruising position.
4.
Select Rudder midships from the Sea Trial menu and
choose
set
from the drop down menu.
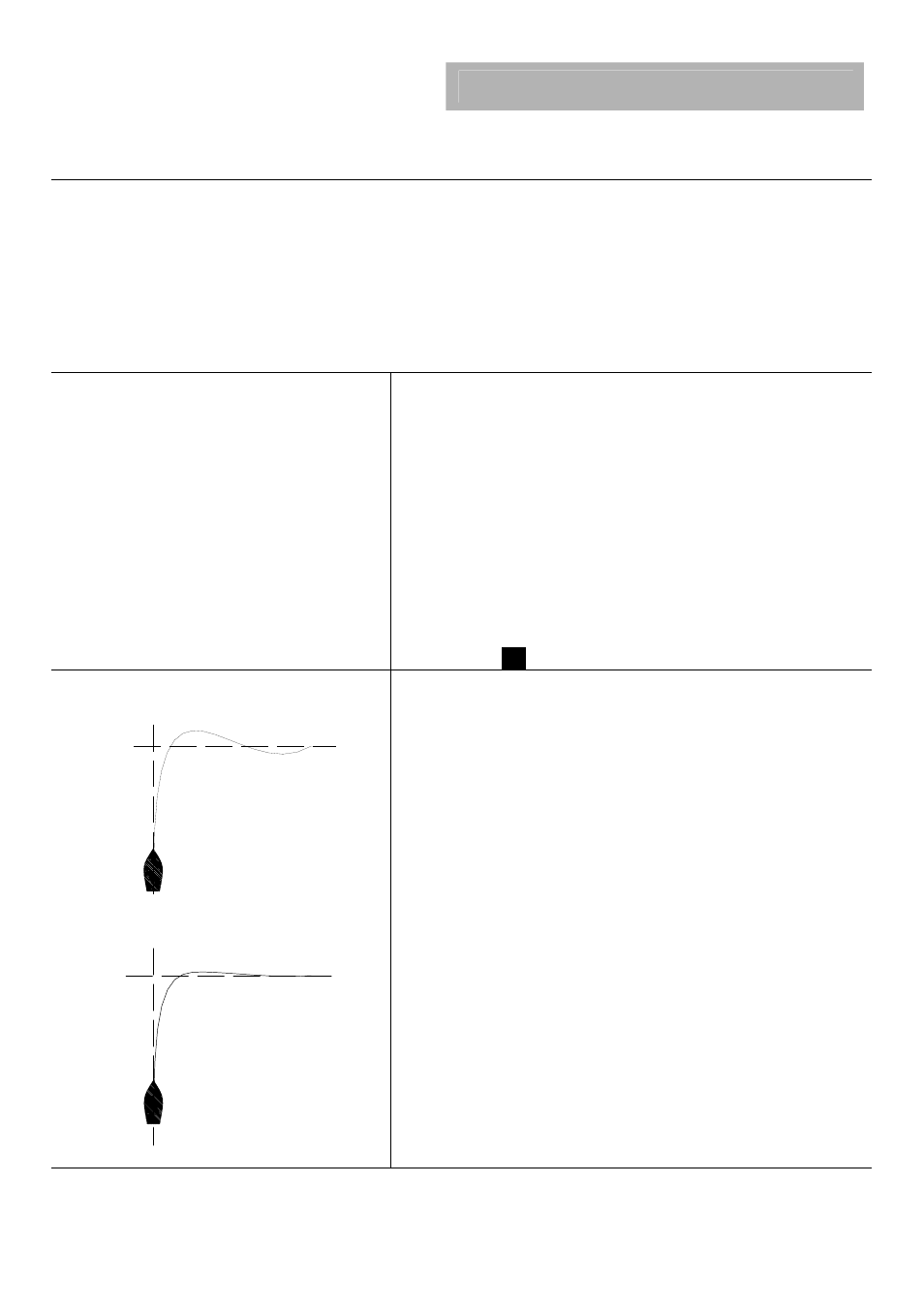
Boat Lag Incorrect
Boat Lag Correct
boat lag
Boat lag is the time taken for the boat to respond to
changes in helm. For example, heavy displacement hulls
require a larger value for boat lag.
1.
Engage the autopilot as previously explained in Initial
Pilot Sea Trial.
2.
At a reasonably slow cruising speed (do not exceed 15
knots) change course by 90 in each direction.
3.
Observe the autopilot steering performance. The boat
should turn onto the new heading with minimal
overshoot (a slight overshoot is acceptable).
4. If the overshoot is consistently more than 5 for
course changes in both directions increase the boat
lag value in steps of 0.1 until the overshoot is
corrected.
5. It is easier to observe overshoot than undershoot,
hence if no overshoot is observed decrease the boat
lag in steps of 0.1 until a small overshoot is seen.
6.
Use the smallest value of boat lag to stop overshoot.