4) 3-axis xyz jog operation, 4) 3-axis xyz jog operation -27 – MITSUBISHI ELECTRIC Mitsubishi Industrial Robot RV-6S User Manual
Page 37
2Unpacking to Installation
Confirming the operation 2-27
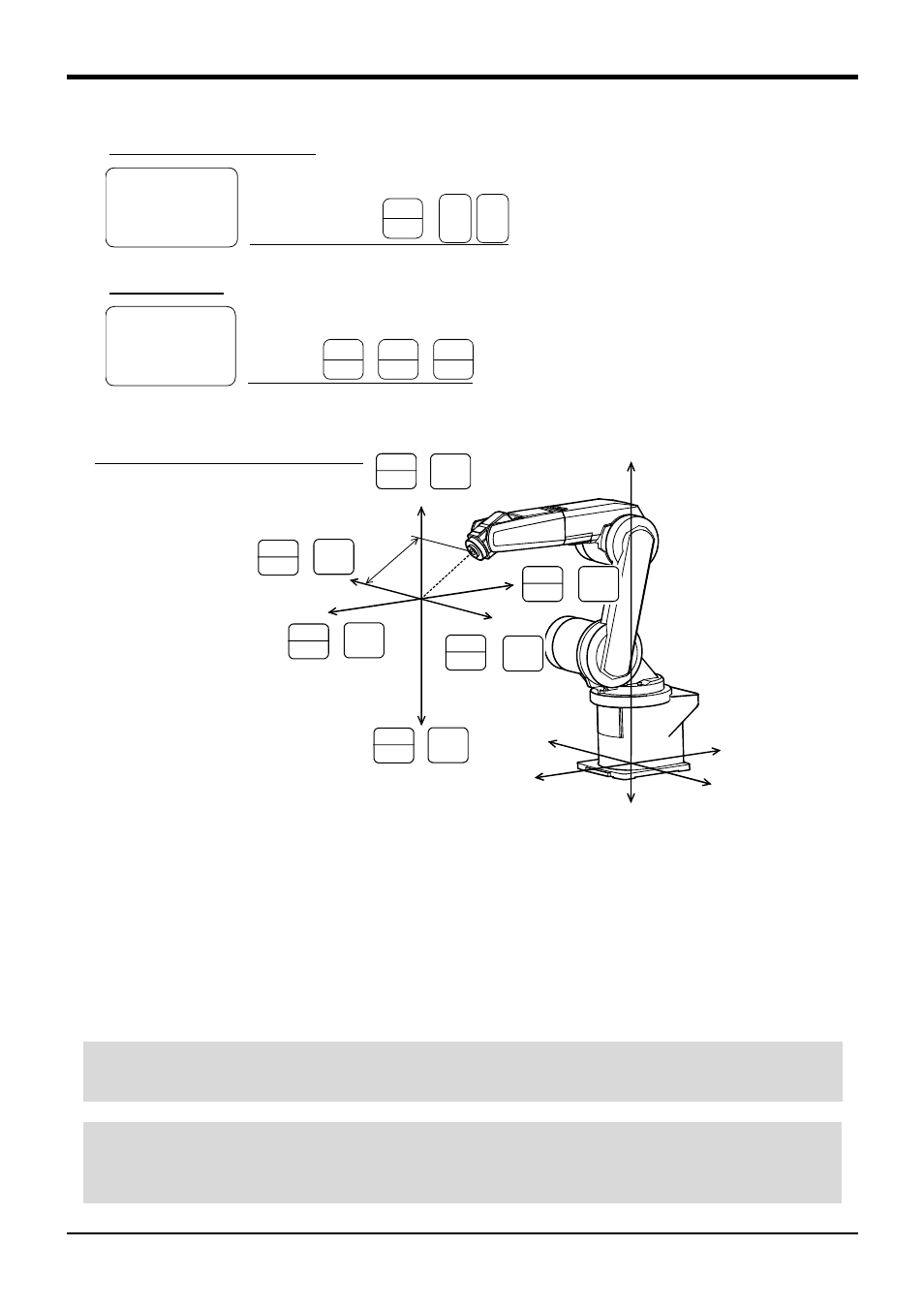
(4) 3-axis XYZ jog operation
Press the [MOVE] + [XYZ] keys, and then
press only the [XYZ] key. "XYZ456" will appear
at the upper left of the screen.
Each time the [MOVE] + [+] keys are pressed,
the override will increase in the order of LOW
→ HIGH → 3 → 5 → 10 → 30 → 50 → 70 →
100%. When the [MOVE] + [-] keys are pressed,
the override will decrease in the reverse order.
The currently set speed will appear on the
upper right of the screen. Set the override to
10% here for confirmation work.
・ When the [MOVE] + [+X (J1)] keys are pressed, the robot will move along the X axis plus direction.
When the [MOVE] + [-X (J1)] keys are pressed, Move along the minus direction.
・ When the [MOVE] + [+Y (J2)] keys are pressed, the robot will move along the Y axis plus direction.
When the [MOVE] + [-Y (J2)] keys are pressed, Move along the minus direction.
・ When the [MOVE] + [+Z (J3)] keys are pressed, the robot will move along the Z axis plus direction.
When the [MOVE] + [-Z (J3)] keys are pressed, Move along the minus direction.
XYZ456 LOW
X +134.50
Y +220.00
Z +280.00
Select the 3-axis XYZ jog mode
XYZ456 LOW
X +134.50
Y +220.00
Z +280.00
Set the jog speed
+
3-axis XYZ jog mode
STEP
MOVE
XYZ
$":
Set the soeed
+
STEP
MOVE
+
FORWD
-
BACKWD
XYZ
$":
+X
+Y
+Z
-Z
-Y
-X
+X
+Z
To
ol
len
gt
h
+Y
+
STEP
MOVE
8
, @\
+ Z
(J3)
+
STEP
MOVE
4
MNO
- Y
(J2)
+
STEP
MOVE
3
JKL
- Z
(J3)
+
STEP
MOVE
' ; ^
+ X
(J1)
+
- X
(J1)
SPACE PQR
STEP
MOVE
+
STEP
MOVE
9
&< >
+Y
(J2)
Moving along the base coordinate system
* The flange position does change.
◇◆◇ Jog mode will change when only [XYZ] key is pressed again ◇◆◇
When the [MOVE] + [XYZ] keys are pressed and then only the [XYZ] key is pressed, the upper left display will
change in the order of "XYZ" → "XYZ456" → "CYLNDER". Each jog mode can be selected.
◇◆◇ The flange surface end axis posture cannot be maintained with 3-axis XYZ jog. ◇◆◇
With 3-axis XYZ jog, the flange surface end axis posture (orientation) is not maintained when moving linearly in
the X, Y or Z axis direction.
Use XYZ jog to maintain the posture.