MITSUBISHI ELECTRIC Mitsubishi Industrial Robot RV-6S User Manual
Page 17
2Unpacking to Installation
Installation 2-7
2.2.2 Transportation procedures (Transporting with a crane)
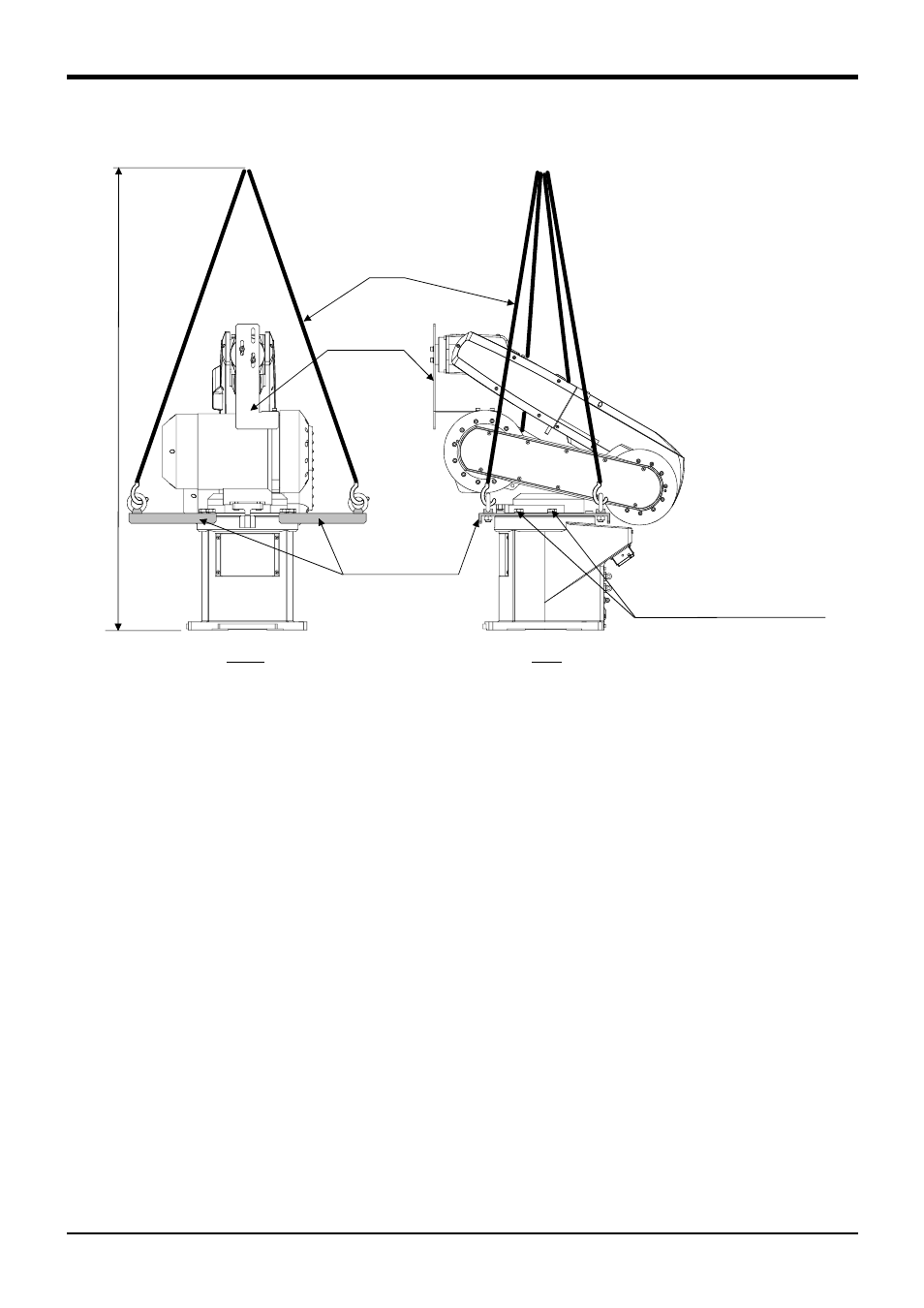
Fig.2-2 : Transportation procedures (transporting with a crane)
1) Attach the suspension fittings to the left and right sides of the shoulder section, and securely fix with bolts
(four M10 x 25, four spring washers for M10). At this time, fix two of the suspension fitting's three holes at
the side closest to the robot front.
2) Catch wires in the eye bolts installed on the suspension fittings, and quietly suspend the arm.
3) At this time, make sure that the wires, etc., do not interfere with the robot arm or covers. Always place
cloth, etc., at interfering places.
4) When transferring to the installation place, take care not to apply vibration or impact.
5) After installing at the installation place, remove the above suspension fittings.
6) Always follow the above procedures and methods to transport the robot for secondary transportation, such
as when changing the installation position.
If the arm is directly suspended without using the specified suspension fittings, or if it is suspended in the
work posture, the configuration devices could be damaged, and the transportation workers will be subject to
risk due to an inadequate center of gravity position.
Fixing plate
Suspension fitting
Wire
Front
Side
13
00
Hexagon socket bolt
(four M10 x 25,
four spring washers for M10)