Yaskawa Sigma-5 Large Capacity Users Manual: Design and Maintenance-Rotary Motors-Mechatrolink-II Communication Reference User Manual
Page 357
10 Appendix
10.1.2 Parameters
10-12
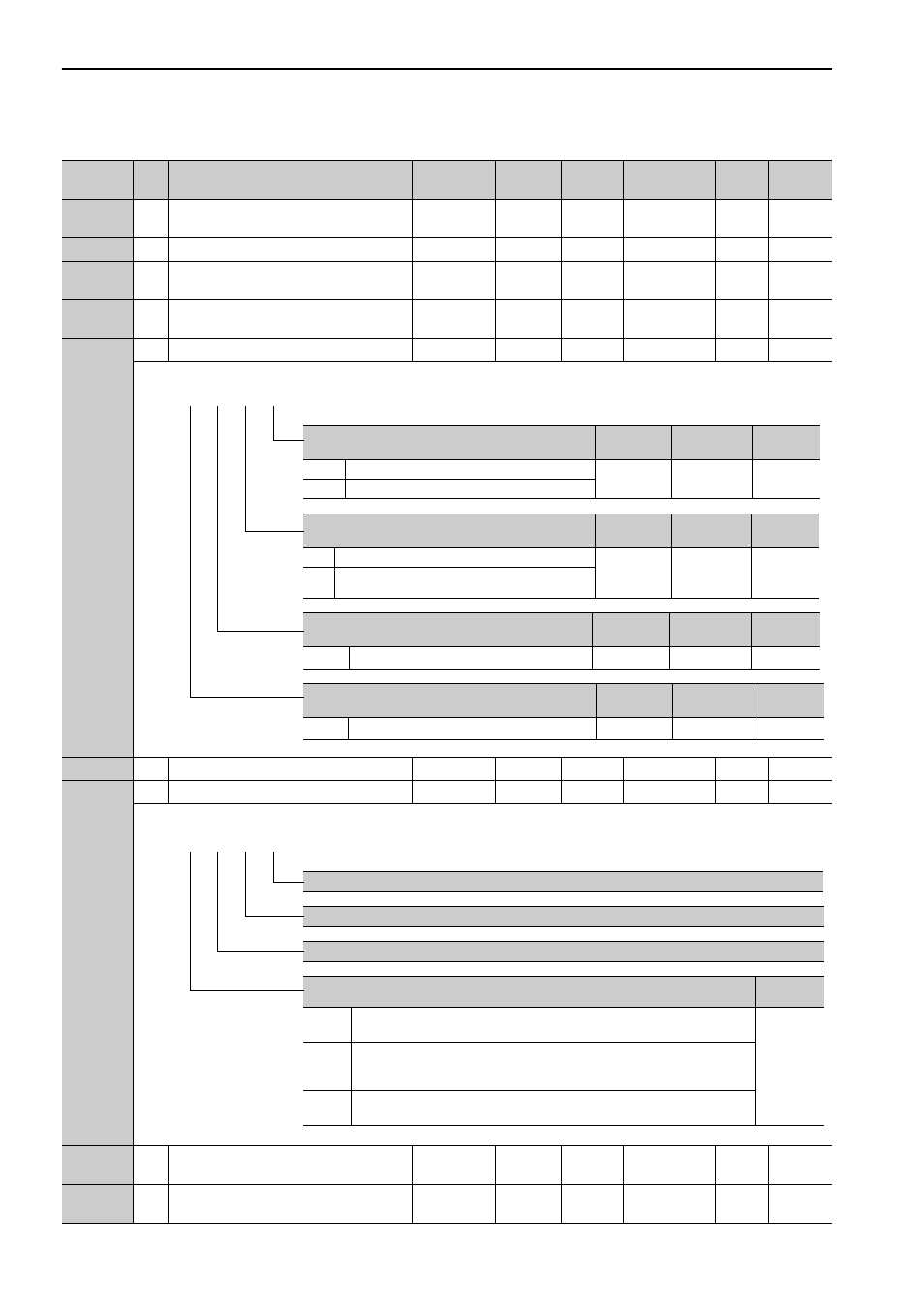
Pn162
2
Anti-Resonance Gain
Compensation
1 to 1000
1%
100
Immediately
Tuning
−
Pn163
2
Anti-Resonance Damping Gain
0 to 300
1%
0
Immediately
Tuning
−
Pn164
2
Anti-Resonance Filter Time Constant 1
Compensation
-1000 to
1000
0.01 ms
0
Immediately
Tuning
−
Pn165
2
Anti-Resonance Filter Time Constant 2
Compensation
-1000 to
1000
0.01 ms
0
Immediately
Tuning
−
Pn170
2
Tuning-less Function Related Switch
0000 to 2411
−
1401
−
–
–
Pn205
2
Multiturn Limit Setting
0 to 65535
1 rev
65535
After restart
Setup
4.7.6
Pn207
2
Position Control Function Switch
0000 to 2210
−
0010
After restart
Setup
−
Pn20A
4
Number of External Scale Pitch
4 to 1048576
1
pitch/rev
32768
After restart
Setup
8.3
Pn20E
4
Electronic Gear Ratio (Numerator)
1 to
1073741824
1
4
After restart
Setup
4.4.3
(cont’d)
Parameter
No.
Size
Name
Setting
Range
Units
Factory
Setting
When
Enabled
Classi-
fication
Reference
Section
Tuning-less Function Selection
When
Enabled
Classification
Reference
Section
0
Disables tuning-less function.
After restart
Setup
5.2
1
Enables tuning-less function.
Control Method during Speed Control
When
Enabled
Classification
Reference
Section
0
Uses as speed control.
After restart
Setup
5.2
1
Uses as speed control and uses the host controller for
position control.
Rigidity Level
When
Enabled
Classification
Reference
Section
0 to 4
Sets rigidity level.
Immediately
Setup
5.2
Load Level
When
Enabled
Classification
Reference
Section
0 to 2
Sets load level.
Immediately
Setup
5.2
4th 3rd 2nd 1st
digit digit digit digit
n.
Reserved (Do not change.)
Reserved (Do not change.)
Reserved (Do not change.)
/COIN Output Timing
Reference
Section
0
Outputs when the position error absolute value is the same or less than the
positioning completed width (Pn522).
4.8.6
1
Outputs when the position error absolute value is the same or less than the
positioning completed width (Pn522), and the reference after position reference
filtering is 0.
2
Outputs when the position error absolute value is the same or less than the
positioning completed width (Pn522), and the position reference input is 0.
4th 3rd 2nd 1st
digit digit digit digit
n.