Yaskawa Sigma-5 User Manual: Design and Maintenance - Linear Motors User Manual
Page 270
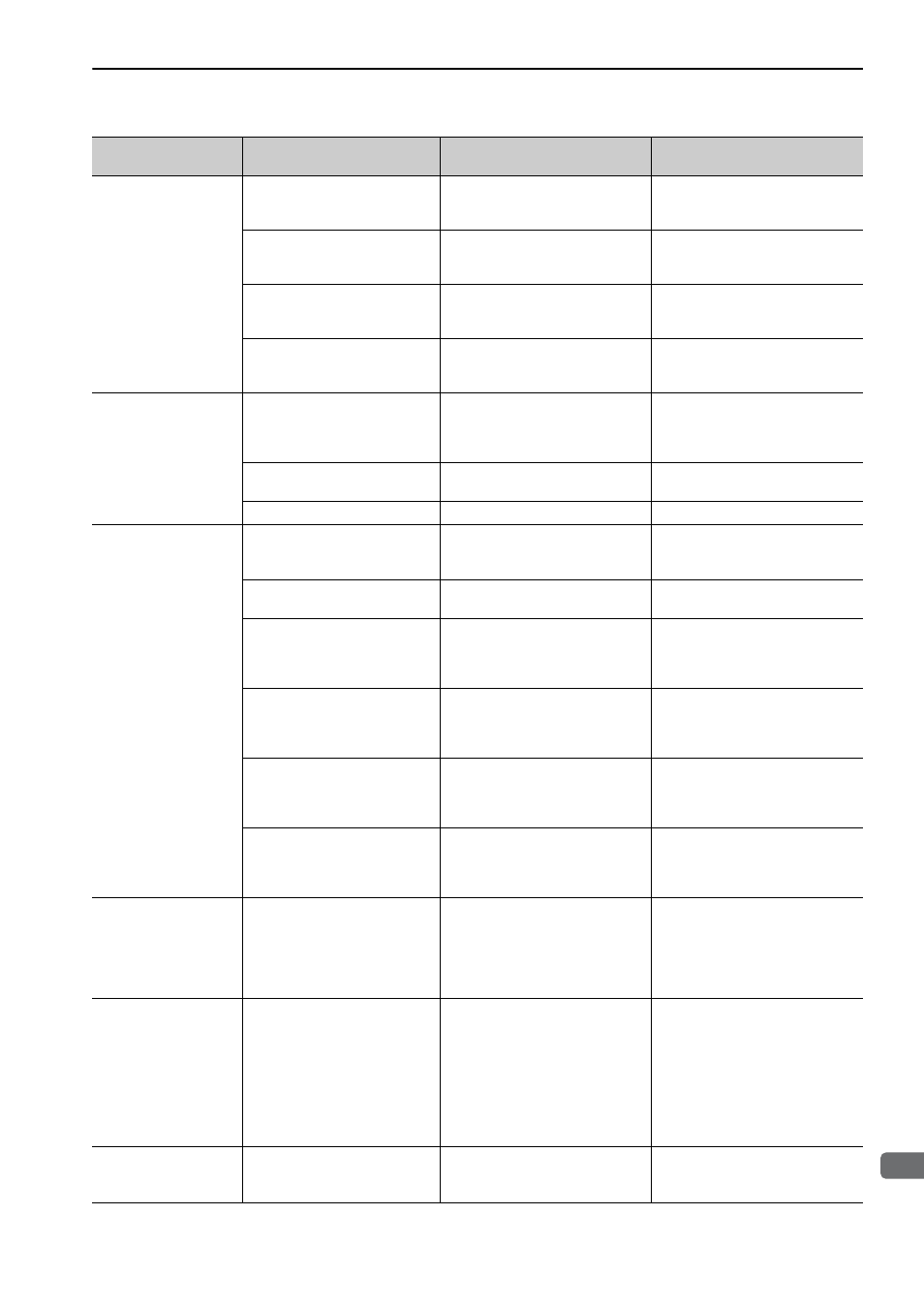
8.1 Troubleshooting
8-19
8
T
roubleshooting
A.CF1:
Feedback Option
Module
Communications Error
(Reception error)
Wiring of cable between serial
converter unit and SERVOPACK
is incorrect or contact is faulty.
Check the linear scale wiring.
Correct the cable wiring.
The specified cable is not used
between serial converter unit and
SERVOPACK.
Confirm the linear scale wiring
specifications.
Use the specified cable.
Cable between serial converter
unit and SERVOPACK is too
long.
Measure the length of the cable for
connecting the serial converter unit.
The cable between serial converter
unit and SERVOPACK must be 20
m max.
Sheath of cable between serial
converter unit and SERVOPACK
is broken.
Check the cable for connecting the
serial converter unit.
Replace the cable.
A.CF2:
Feedback Option
Module
Communications Error
(Timer stop)
Noise interferes with the cable
between serial converter unit and
SERVOPACK.
−
Correct the wiring around serial
converter unit, e.g., separating
input/output signal line from main
circuit cable or grounding.
A serial converter unit fault
occurred.
−
Replace the serial converter unit.
A SERVOPACK fault occurred.
−
Replace the SERVOPACK.
A.d00:
Position Error Pulse
Overflow
(Position error exceeded
the value set in the
excessive position error
alarm level (Pn520))
The contact in the linear servo-
motor U, V, and W wirings is
faulty.
Check the linear servomotor main
circuit cable connection.
Confirm that there is no contact
fault in the linear servomotor wiring
and linear scale wiring.
The SERVOPACK gains are too
low.
Check the SERVOPACK gains to
see if they are not too low.
Increase the servo gains (Pn100,
Pn102, etc.)
The frequency of the position ref-
erence is too high.
Reduce the reference frequency, and
operate the SERVOPACK.
Reduce the position reference fre-
quency or reference acceleration.
Or, reconsider the electronic gear
ratio.
The position reference accelera-
tion is too fast.
Reduce the reference acceleration,
and operate the SERVOPACK.
Apply the smoothing function, such
as using position reference accelera-
tion/deceleration time constant
(Pn216).
Setting of the Pn520 (Excessive
Position Error Alarm Level) is
too low for the operating condi-
tion.
Check the alarm level (Pn520) to
see if it is set to an appropriate
value.
Set the Pn520 to proper value.
A SERVOPACK fault occurred.
−
Turn the power supply OFF and
then ON again. If the alarm still
occurs, the SERVOPACK may be
faulty. Replace the SERVOPACK.
A.d01:
Position Error Pulse
Overflow Alarm at
Servo ON
When setting not to clear position
error, the linear servomotor
moved while the servo was OFF,
resulting in position error over-
flow.
Check the error counter (Un008)
while the linear servomotor power
is OFF.
Make the setting so that the position
error is cleared when the servo is
OFF.
Or, correct the excessive position
error alarm level at servo ON
(Pn526).
A.d02:
Position Error Pulse
Overflow Alarm by
Speed Limit at Servo
ON
The servo was turned ON while
the position error accumulated,
and the reference was input while
the linear servomotor was run-
ning at the speed limit (Pn584).
As a result, the position error
count exceeded the excessive
position error alarm level
(Pn520).
–
Set position error to be cleared
while in servo OFF status.
Or, correct the excessive position
error alarm level (Pn520).
Or, adjust the speed limit level
(Pn584) when servo turns ON.
A.d30:
Position Data
Overflow
The position data exceeded
±1879048192.
Check the reference counter
(Un00C).
Reconsider the operating specifica-
tions.
Alarm:
Alarm Name
Cause
Investigative Actions
Corrective Actions