Yaskawa AC Drive - A1000 Motion Control Custom User Manual
Page 29
5 Function Description
YASKAWA TM.A1000SW.117 Motion Control Custom Software Supplement
29
Homing
Homing is required in order to orient the drive to the mechanical system. A homing routine may or may not be required
depending on the motion type and encoder type. If the selected motion type is absolute linear or absolute rotary (P1-01 =
1 or 2), and an absolute encoder is not present, homing will be required at power-up, when motion control is re-enabled
after being disabled, when motion type is changed (P1-01) or when encoder type is changed (P3-01). Switching the drive
into Local mode will NOT require the drive to be re-homed.
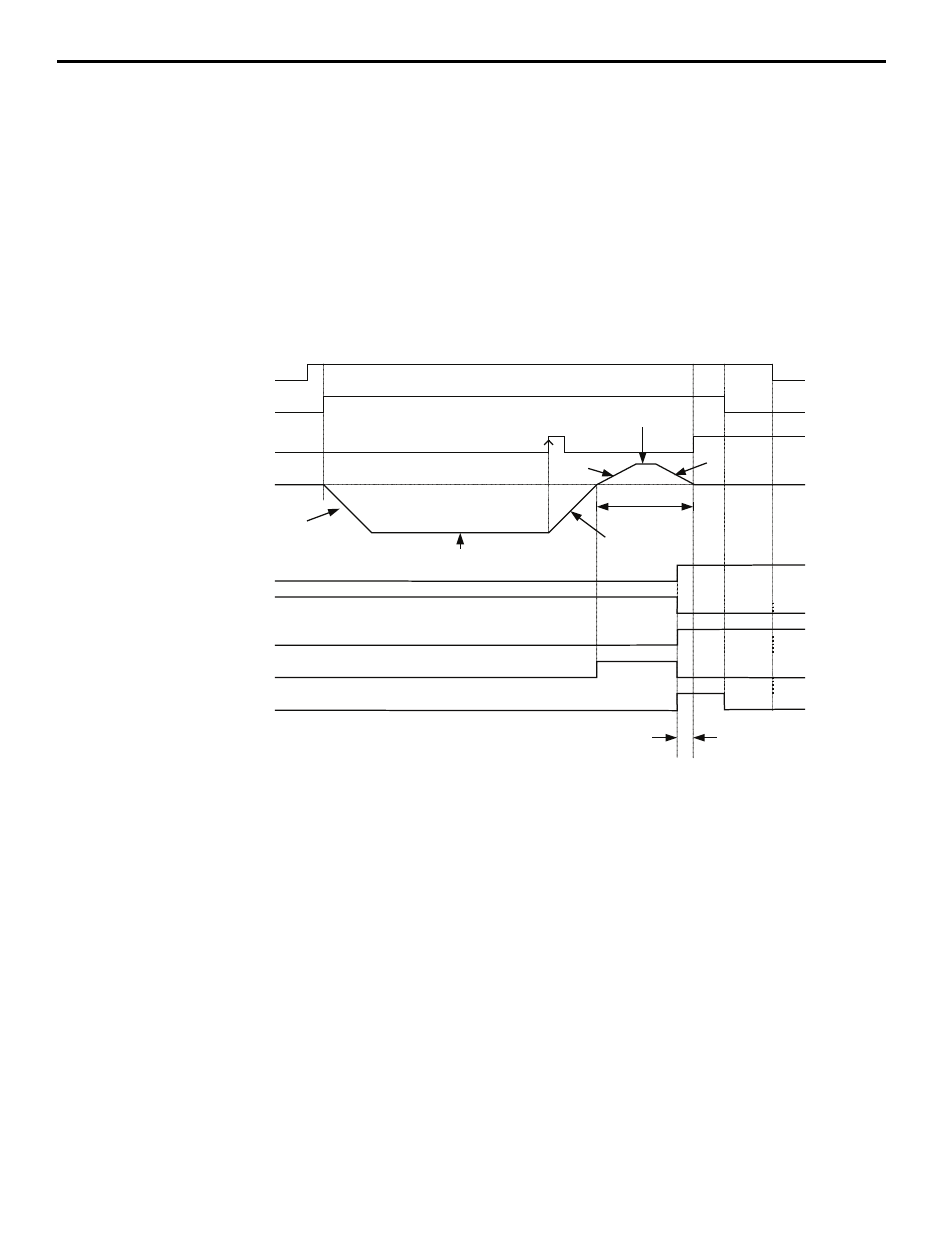
Home Negative
When the home command input is closed, the drive will accelerate using the C1-07 ramp in the negative (reverse)
direction at the homing speed. As soon as the home switch is activated, the drive records the position as home then
decelerates using the decel rate specified in parameter C1-08. The drive then performs a move to home + home offset
using d1-16 as the speed, and C1-01 and C1-02 as the accel and decel ramps.
Figure 12
Figure 12 Home Negative Timing Chart (P2-01=0)
Digital
Inputs
Motor
Speed
Digital
Outputs
Run Cmd
Home Cmd
During Move
Move Complete
C1-07
Move To
Home
In PosiƟon
Window
(P1-08)
0 Hz
Home Switch
Homing Needed
At Home
Homing Compl.
C1-08
(-)P2-02
C1-01
C1-02
d1-16