Yaskawa AC Drive - A1000 Motion Control Custom User Manual
Page 18
4 Related Parameters and Functions
18
YASKAWA TM.A1000SW.117 Motion Control Custom Software Supplement
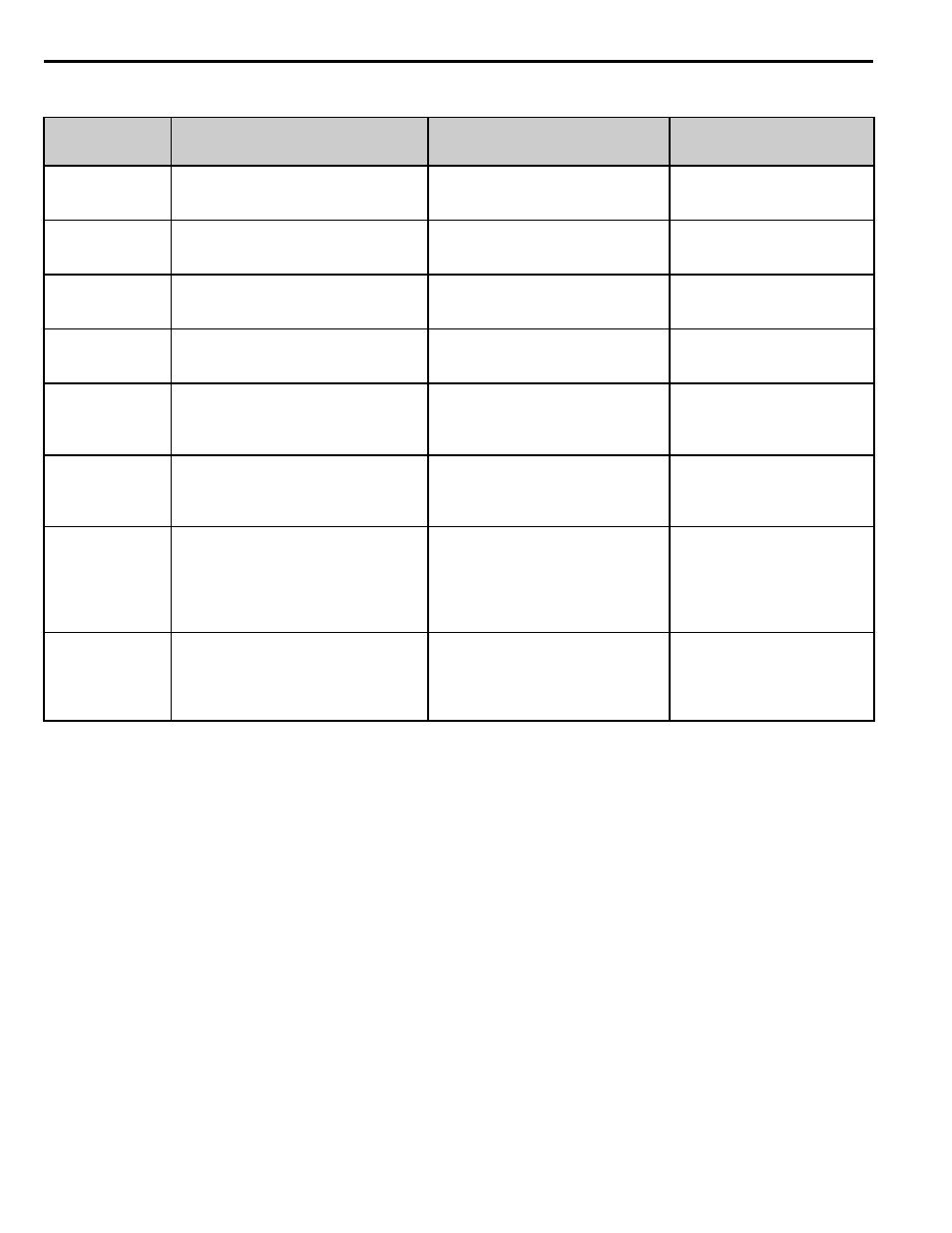
Table 14 Alarms
Alarm Indication
LCD
Description
Cause
Countermeasures
Run Homing
SequenceRHS
Run Homing Seq
Run Homing Sequence
A move or learn command was given
before the drive has been homed. This
will only occur when P1-01 = 1 or 2.
Perform a homing routine.
Positive Over Travel
POSOT
Pos Ovr Travel
Positive Over Travel
The machine has moved past the positive
over-travel switch.
Drive can be moved out of positive
over-travel using the Jog Reverse
input.
Negative Over Travel
NEGOT
Neg Ovr Travel
Negative Over Travel
The machine has moved past the negative
over-travel switch.
Drive can be moved out of
negative over-travel using the Jog
Forward input.
Position Out of Range
POSOR
Out of Range
Position Out of Range
The drive has been commanded to learn a
position that is out of range of learning.
Open the learn position digital
input to stop trying to learn the
position.
Serial Encoder
Reading
SENCR
Ser Enc Reading
The drive is receiving position information
from the absolute incremental encoder. All
run commands are ignored during this time.
Absolute incremental encoder is
reporting its position by bringing a multi-
function input (A2 or A3) above 9 V.
Wait for absolute incremental
encoder to finish (35 sec. Max), or
troubleshoot analog input wiring.
Serial Encoder Fault
SENCF
Ser Enc Fault
Absolute Incremental Encoder fault.
The drive did NOT receive valid
data/control signals from the absolute
incremental encoder within 35 seconds
after power up or home command.
Check encoder and wiring, Check
that an analog input and output are
programmed and wired properly
for a absolute incremental encoder
Learning Position
LEARN
Learning Pos
The Learn Position digital input is closed
and the drive is learning the current position.
This takes 1 second to complete.
The drive is Learning the current
position.
Open the Learn Position digital
input before the position is learned.
Or, once the position is learned, the
display will clear and the Learn
Complete digital output and
message will appear.
Learning Complete
LEARN
Learn Complete
The Learn Position digital input has been
closed for at least 1 second and the current
position has been stored in the P4 parameter
specified by the user. The Learn Complete
digital output is also closed.
The current position has been stored in
the P4 parameter specified by the user
and the Learn Complete digital output is
also closed.
Open the Learn Position digital
input.