Yaskawa AC Drive - A1000 Motion Control Custom User Manual
Page 21
5 Function Description
YASKAWA TM.A1000SW.117 Motion Control Custom Software Supplement
21
The position reference is scaled as follows: Commanded Position (in encoder counts) = Frequency Reference × P1-09.
Move velocity is determined by parameter d1-09, and accel and decel rates are determined by parameters C1-01 and C1-
02. For example:
If P1-09 = 4096 counts/unit, and the frequency reference over the option PCB is 15.00 Hz, this would result in a move
that is exactly 61440 encoder counts (4096 × 15.00 = 61440). The option frequency reference channel returns to normal
operation as an actual frequency reference when motion control is disabled.
1. The position reference is scaled as follows:
Commanded Position (in encoder counts) = Frequency Reference × P1-09
2. Move velocity is determined by parameter d1-09, and accel and decel rates are determined by parameters C1-01 and
C1-02.
For example: If P1-09 = 4096 counts/unit, and the frequency reference over the option PCB is 15.00 Hz, this would
result in a move that is exactly 61440 encoder counts (4096 × 15.00 = 61440).
When motion control is disabled, the option frequency reference channel returns to normal operation as an actual
frequency reference.
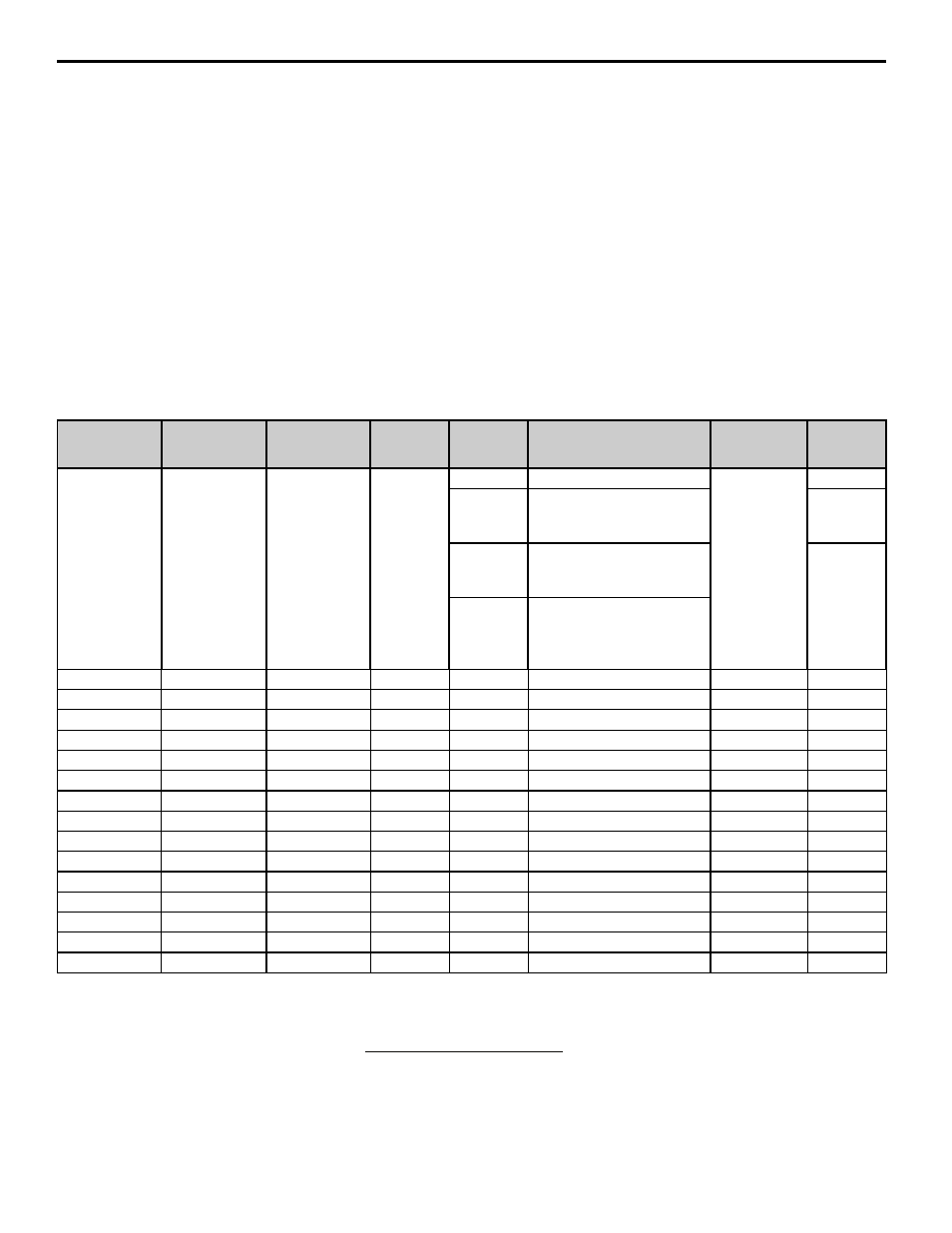
Table 15 Profile Selection Information
Distance
Select
D
Distance
Select
Distance
Select
<1> Programmable using the digital input parameters H1-01 to H1-10.
<2> When P1-02=1, the actual commanded destination is calculated as follows:
Destination=Memobus register 6D0H × P1-09/100
<3> Actual destination (in encoder quadrature counts) is calculated as follows when b1-01= 3:
<4> When motion control is disabled, the Option PCB frequency reference register returns to its normal function.
Distance
Select
A
Parameter
P1-02
Setting
Position Reference Source Accel/Decel
Parameters
Max Speed
Used
Open
Open
Open
Open
0
Parameter P4-01
C1-01 and
C1-02
d1-09
1
Memobus Address
06D1h
100=1.00 Units
Memobus
Address
06D0h
2
Option PCB Frequency
Reference Register
(in XXX.XX Units)
d1-09
3
Memobus Address
06D0h (low word) and
06D1h (high word)
In quadrature encoder counts.
Open
Open
Open
Closed
N/A
P4-02
C1-03 & C1-04
d1-10
Open
Open
Closed
Open
N/A
P4-03
C1-05 & C1-06
d1-11
Open
Open
Closed
Closed
N/A
P4-04
C1-07 & C1-08
d1-12
Open
Closed
Open
Open
N/A
P4-05
C1-01 & C1-02
d1-13
Open
Closed
Open
Closed
N/A
P4-06
C1-03 & C1-04
d1-14
Open
Closed
Closed
Open
N/A
P4-07
C1-05 & C1-06
d1-15
Open
Closed
Closed
Closed
N/A
P4-08
C1-07 & C1-08
d1-16
Closed
Open
Open
Open
N/A
P4-09
C1-01 & C1-02
d1-09
Closed
Open
Open
Closed
N/A
P4-10
C1-03 & C1-04
d1-10
Closed
Open
Closed
Open
N/A
P4-11
C1-05 & C1-06
d1-11
Closed
Open
Closed
Closed
N/A
P4-12
C1-07 & C1-08
d1-12
Closed
Closed
Open
Open
N/A
P4-13
C1-01 & C1-02
d1-13
Closed
Closed
Open
Closed
N/A
P4-14
C1-03 & C1-04
d1-14
Closed
Closed
Closed
Open
N/A
P4-15
C1-05 & C1-06
d1-15
Closed
Closed
Closed
Closed
N/A
P4-16
C1-07 & C1-08
d1-16
Destination =
Frequency Reference (hi-speed rgister)
100
P1-10
X