Sensoray 518 User Manual
Page 54
53
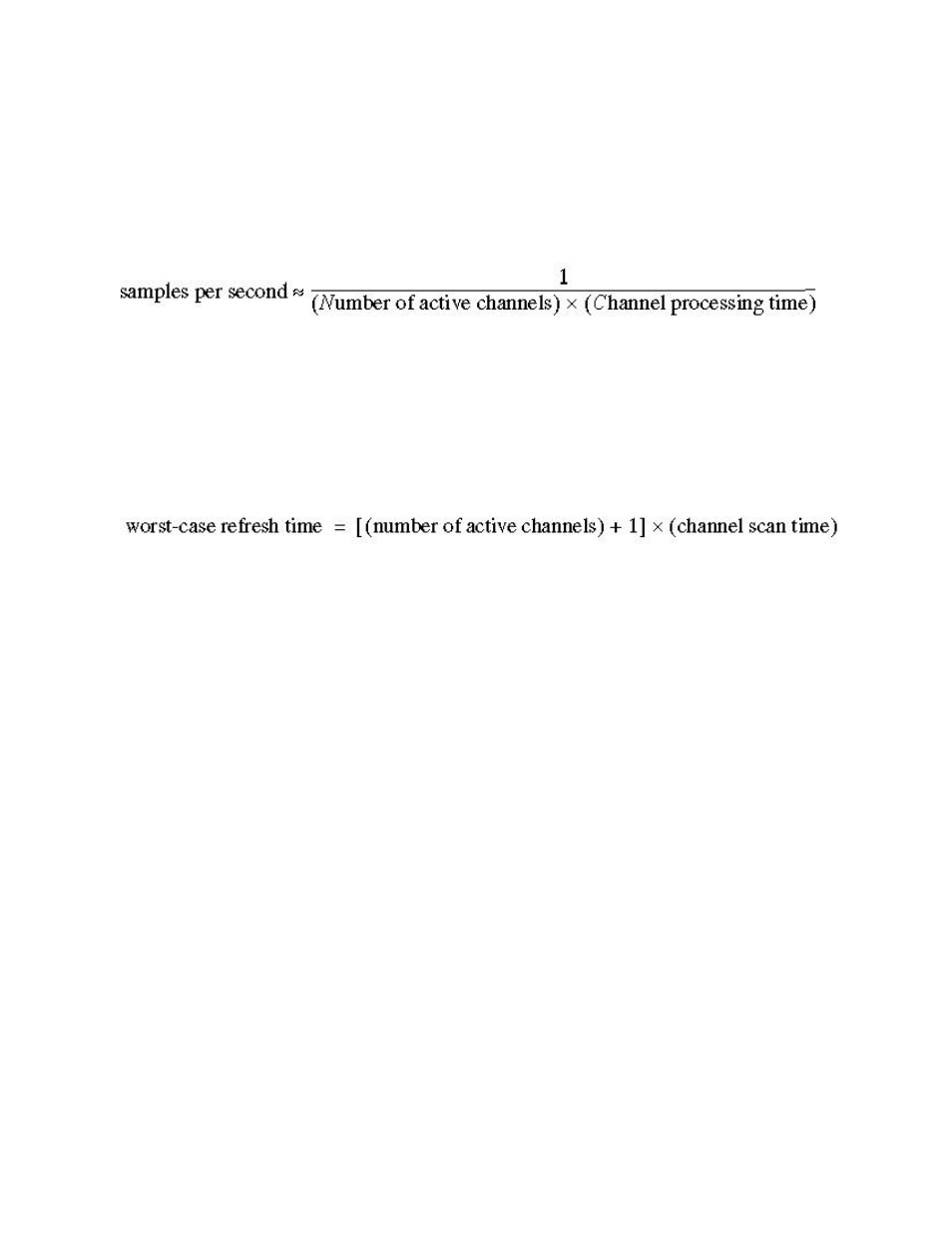
Clearly, the scan time will decrease as the number of active channels decrease. Channels can be
removed from the scan loop by disabling them with the define channel sensor command in
conjunction with the disabled channel sensor definition code. The update rate for each channel is
approximated by this function:
Another important parameter is the refresh time. The refresh time is the time spacing between
updates of any particular channel’s measured data. This parameter may be critical in applications
that require guaranteed new data every time channel data is read. In such applications, it is
necessary to know the worst-case refresh time -- the minimum time between successive reads
from any channel while guaranteeing fresh data. The worst-case refresh time is given by this
function:
All communication functions are interrupt-driven in the 518’s local environment. As a result,
both communication latency and overhead are kept to a minimum. Even so, time spent
communicating with the host is frequently time stolen from the scanning function. Keep in mind
that communication traffic between host and 518 will tend to reduce the scan rate and increase
the worst-case refresh time.
Communication Latency
Communication latency is defined here as communication delays between host and 518. Perhaps
the most important measure of latency is the amount of time elapsed from a host request for
sensor data to the acquisition of that data. This is called the acquisition latency.
Acquisition latency can be viewed as having two parts: command response delay is the time
from request to first response byte, and data queue delay is the time between response bytes.
Two commands return sensor data to the host processor, read all channels and read channel
data. The worst-case command response delay is the same for both commands: 70 microseconds.
The worst-case data queue delay is 20 microseconds.
The read channel data command consumes a maximum of 90 microseconds. This is computed as
follows: 70 microseconds from command issue to availability of the first response byte, plus 20
microseconds from the time the host reads the first byte to availability of the second response
byte. This analysis ignores any host processor timing overhead.
The read all channels command consumes 370 microseconds as follows: 70 microsecond
command response delay plus 15 more data bytes with 20 microsecond data queue delay each.