Research Concepts RC4000 User Manual
Page 145
RC4000 Antenna Controller
Chapter 4
Support
137
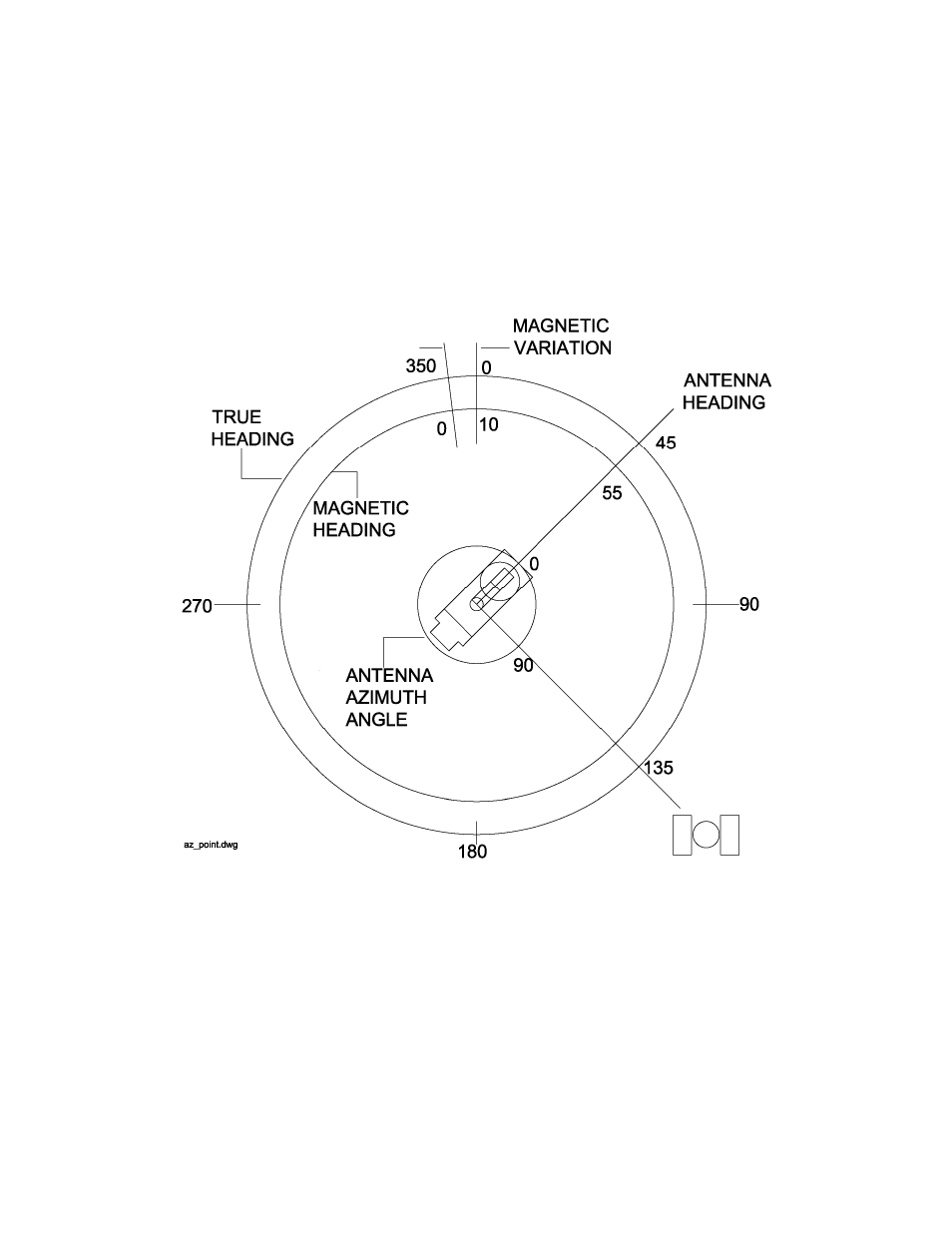
The azimuth portion of the pointing vector is calculated with respect to local true North. The fluxgate
compass is used to determine the heading of the centerline of azimuth travel and the required movement
in the azimuth axis is calculated.
In the above example a true heading of 135 degrees to the satellite has been calculated. Based on the
mount’s latitude, longitude and date, a local magnetic variation (see 1.3.8) of 10 degrees is calculated.
The compass senses a magnetic heading of 55 for the azimuth reference direction. Applying the
magnetic variation, this yields an apparent true heading of 45 degrees for the antenna reference
direction. An azimuth movement of 90 (135 – 45) degrees clockwise is therefore needed to point at the
satellite.
Since a position sensor on the azimuth axis is always active, the RC4000's default displayed azimuth
value is that of the antenna angle. Derived estimates of the magnetic and true heading of the mount may
be selected in the MANUAL (3.2.1) and LOCATE (3.2.2.3) modes.