Guralp Systems Scream User Manual
Page 68
Scream! 4.5
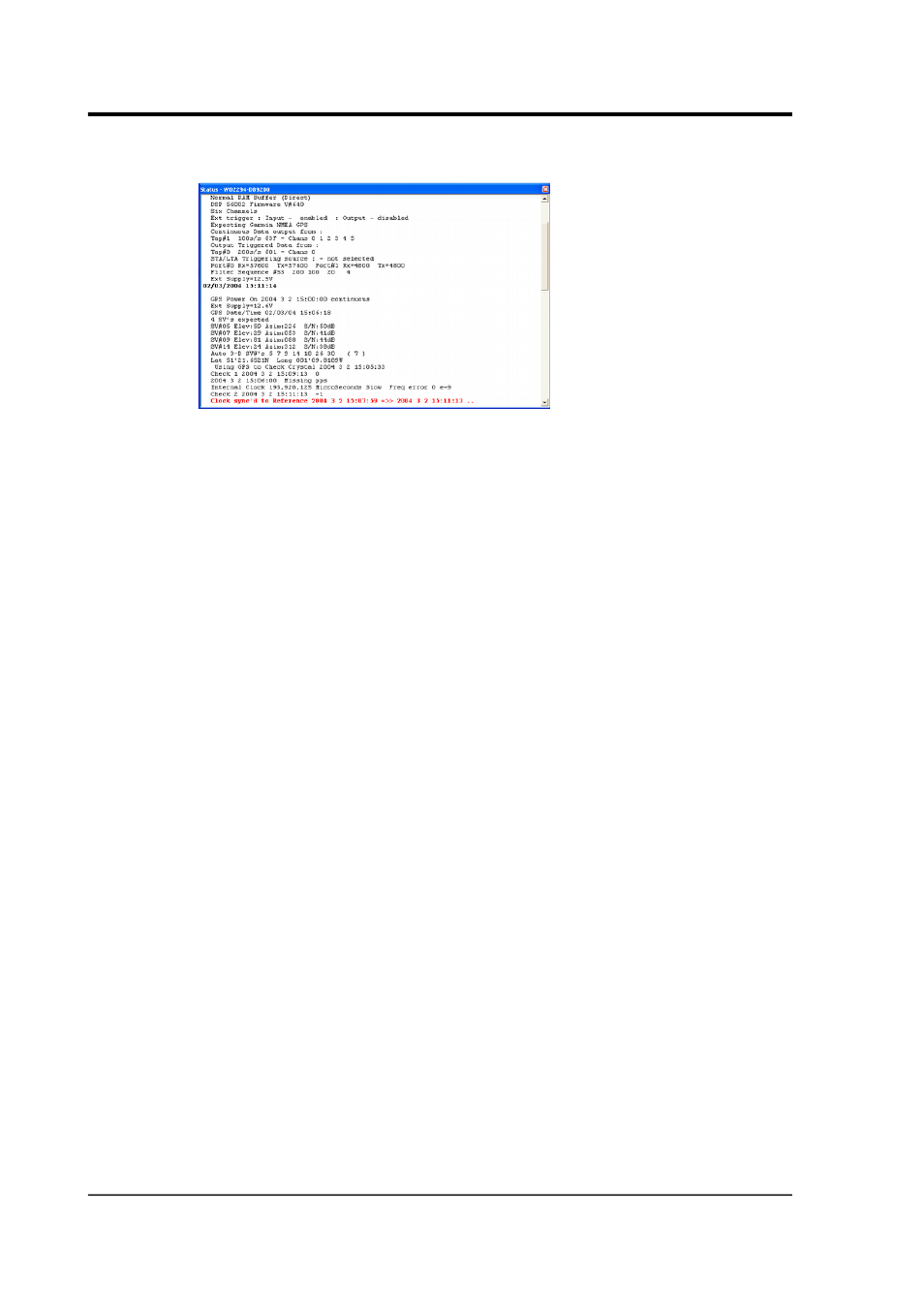
A typical GPS status report from a DM24 digitiser looks like this:
This report shows the satellites the system has found, along with their
corresponding signal strengths.
If the system has not been moved from its previous location, it should
be able to find enough satellites to obtain an accurate GPS time fairly
quickly; if the GPS receiver has difficulty finding satellites, there may
be a delay of several minutes before a new message is displayed.
Before beginning, the digitiser's internal time synchronisation software
will wait for the GPS unit to report a good position fix from at least
three satellites, for at least six consecutive messages. Messages are
normally received every 10 to 20 seconds.
The system will then set the internal clock and re-synchronise the
Analogue to Digital Converters so that the data are accurately
time-stamped to the new reference. Any data transmitted up to this
point will be stamped with the time from the internal backup clock,
which is set to the new accurate time at the end of this process. The
re-synchronisation will result in a discontinuity in the data received.
From this point, the control process will attempt to keep the internal
time-base synchronised to the GPS 1 pulse-per-second (PPS) output,
by adjusting a voltage-controlled crystal oscillator. First it alters the
voltage control to minimise the error. Next it attempts to minimise
both the “phase error” (i.e. the offset between the internal 1 Hz signal
and the GPS) and the drift (the frequency error relative to GPS).
During the control process the system reports the measured errors and
the control signal applied, as a PWM (Pulse Width Modulation) value.
During the initial, coarse adjustment stage, only the coarse voltage
control is used and no drift calculation is made. If the system is
operating in a similar environment to that when the system was last
powered (most importantly, the same temperature), the saved control
68
Issue K