5 install propeller, Attention – FeiYu Tech FY-41AP User Manual
Page 20
Guilin Feiyu Electronic Technology Co., Ltd
Guilin Feiyu Electronic Technology Co., Ltd http://www.feiyu-tech.com [email protected]
Page 18
order to start motors.
(Please do not install propeller yet.)
Meet the following conditions:
Put Throttle stick to the lowest position
Put Aileron stick to any endpoint position
Put Elevator stick to any endpoint position
Put Rudder stick to any endpoint position
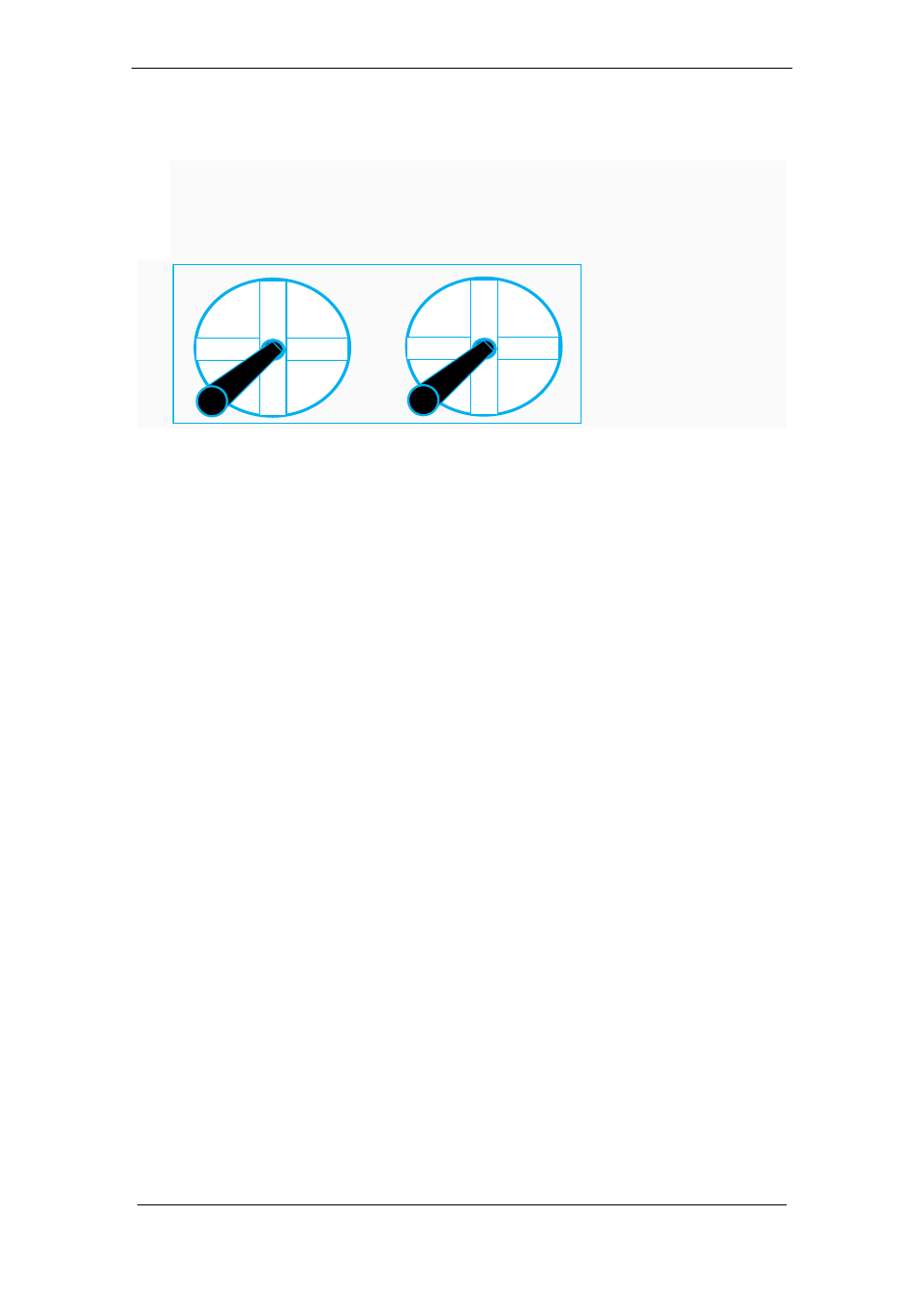
Please slowly push the throttle and according to the picture ―Motor Mixer‖ shows to
check the motor rotation direction is right or not.
Attention:
(1) Altitude Stabilized Mode and Hovering Mode both can execute Combination Stick Commands (CSC)
to start the motor.
(2) In Hovering mode, if you want to take off after execute Combination Stick Commands (CSC), also
you need push the RC throttle stick to above half position. Altitude Stabilized Mode did not have this
limit.
(3) If you do not have any control action with 6 seconds after execute Combination Stick Commands
(CSC),the FY-41AP will into the state before execute Combination Stick Commands. If you want to
take off ,you need to execute Combination Stick Commands again.
1) Altitude Stabilized Mode: If the RC throttle stick is not in the lowest position,FY-41AP will not into
the state before execute Combination Stick Commands.
2) Hovering mode: When your aircraft landed into the ground , And FY-41AP detected there is no
altitude change, it will closed the engine and into the state before execute Combination Stick
Commands.
(4) Auto Return To Launch Mode(RTH) is all controlled by FY-41AP,RC sticks human intervention is
invalid.
(5) Wind pressure in the volatile situation, due to the throttle closed protection restrictions, hovering
mode and Auto Return To Launch Mode(RTH) may appear the situation which can not closed the
throttle, then you just need to put the RC throttle stick to the lowest and switch into Altitude Stabilized
Mode.
13.5 Install Propeller
In order to install the propeller, please follow the motor rotation direction according to