Digilent Cerebot II Board User Manual
Page 9
Cerebot II Reference Manual
Digilent, Inc.
www.digilentinc.com
page 9 of 10
Copyright Digilent, Inc. All rights reserved. Other product and company names mentioned may be trademarks of their respective owners.
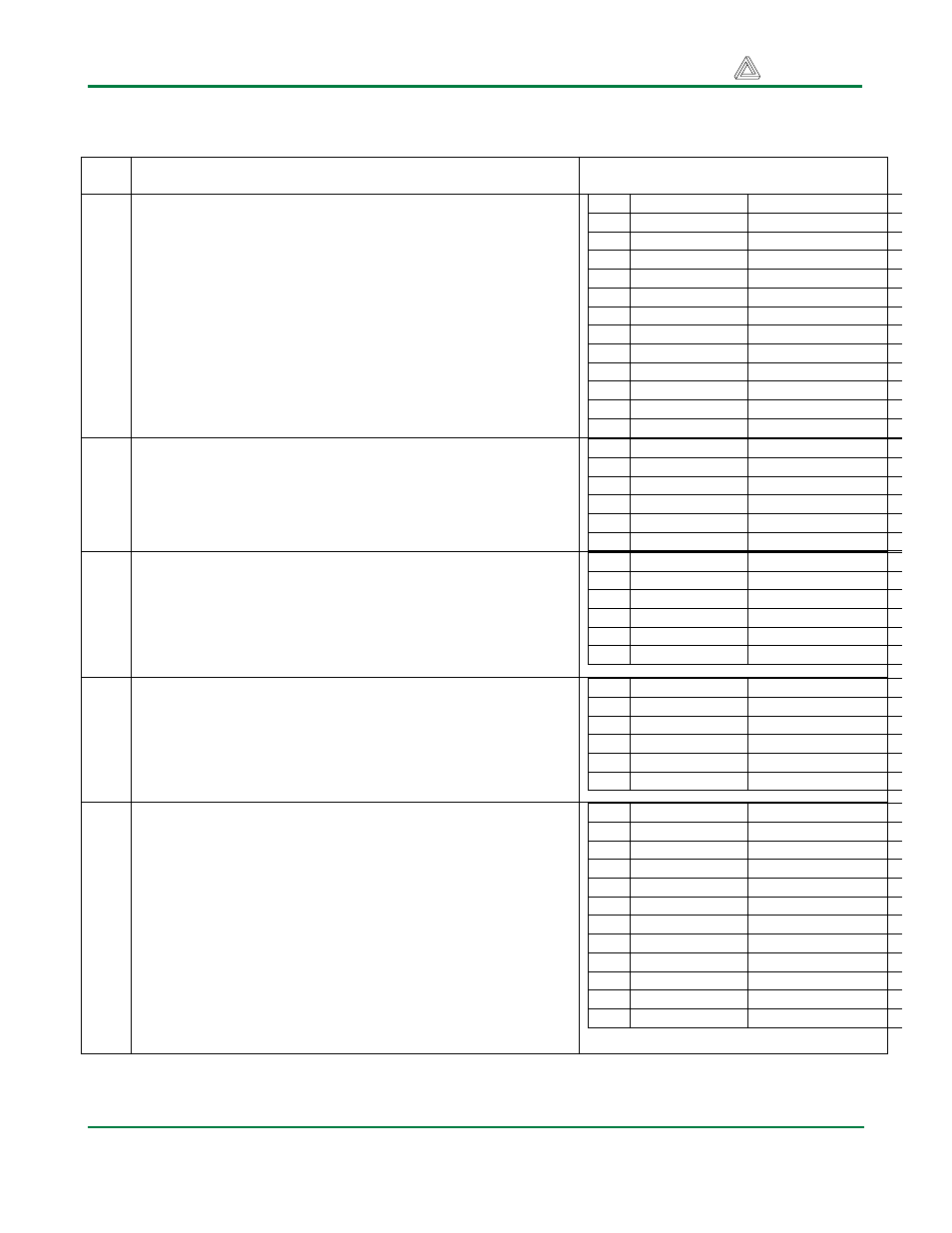
Pin
Description
Cerebot II Pmod Header Pins to
ATmega64L Ports / Bit
JD
SPI interface
The SPI interface on JD is used for synchronous serial
communication of host processor and peripherals or for a
connection of two processors. Master or slave modes are
selected as part of the software.
Serial port communications and interrupts
Asynchronous serial port, UART1, as well as the Atmel TWI
interface can be accessed on JD. These pins can also be
used as external interrupt sources.
Pin Function
Port / Bit
1
SS
PB 0
2
MOSI
PB 2
3
MISO
PB 3
4
SCK
PB 1
5
GND
6
VCC
7
SCL/ INT0
PD 0
8
SDA/ INT1
PD 1
9
RXD1/ INT2
PD 2
10
TXD1/ INT3
PD 3
11
GND
12
VCC
JE
H-bridge connection with input capture
This port can be used to provide two pulse width modulated
outputs to run two motors, or it can be used to run a single
motor with input sensing for a shaft encoder or other sensor.
The PmodHB3 or PmodHB5 can be used for this application.
1
T1
PD 6
2
OC1A
PB 5
3
ICP1
PD 4
4
OC1B
PB 6
5
GND
6
VCC
JF
H-bridge connection, interrupts, and on-board LEDs
Use this port to run two motors, like JE, or a motor with input
sensing for a shaft encoder or other sensor. All of the pins on
this header give access to interrupt inputs, providing flexibility
for application development. JF can be used as a motor
controller or interrupt source. The onboard LEDs share pins
with this header and can display information.
1
T3/ INT6
PE 6
2
OC3B/ INT4
PE 4
3
ICP3/ INT7
PE 7
4
OC3C/ INT5
PE 5
5
GND
6
VCC
JG
H-bridge connection
This port can be used to provide two pulse width modulated
outputs to run two motors, or it can be used to run a single
motor with input sensing for a shaft encoder or other sensor.
The PmodHB3 or PmodHB5 can be used for this application.
1
T2
PD 7
2
OC0
PB 4
3
XCK1
PD 5
4
OC2/ OC1C
PB 7
5
GND
6
VCC
JH
Analog input
Inputs to the analog to digital converter of the ATmega64L.
ADC0 and ADC1 are connected to the Cerebot II’s voltage
monitoring circuits. ADC0 is the input for monitoring VU board
power and ADC1 is connected to VS for monitoring the
independent servo power.
The default fuse setting for the Cerebot II is to disable the
JTAG input and provide analog inputs. The ATmega64L fuse
settings have to be changed to enable the JTAG interface to
use JH as a JTAG device input (e.g., to use the Atmel
JTAGICE mkII).
The pins on JH are shared with the servo connectors S1-S8.
1
ADC0
PF 0
2
ADC1
PF 1
3
ADC2
PF 2
4
ADC3
PF 3
5
GND
6
VCC
7
ADC5/ TMS
PF 5
8
ADC7/ TDI
PF 7
9
ADC6/ TDO
PF 6
10
ADC4/ TCK
PF 4
11
GND
12
VCC