Doepfer R2M Midi-Ribbon-Controller User Manual
Page 25
R2M User's Guide V1.11
Page 25
Fig. 9
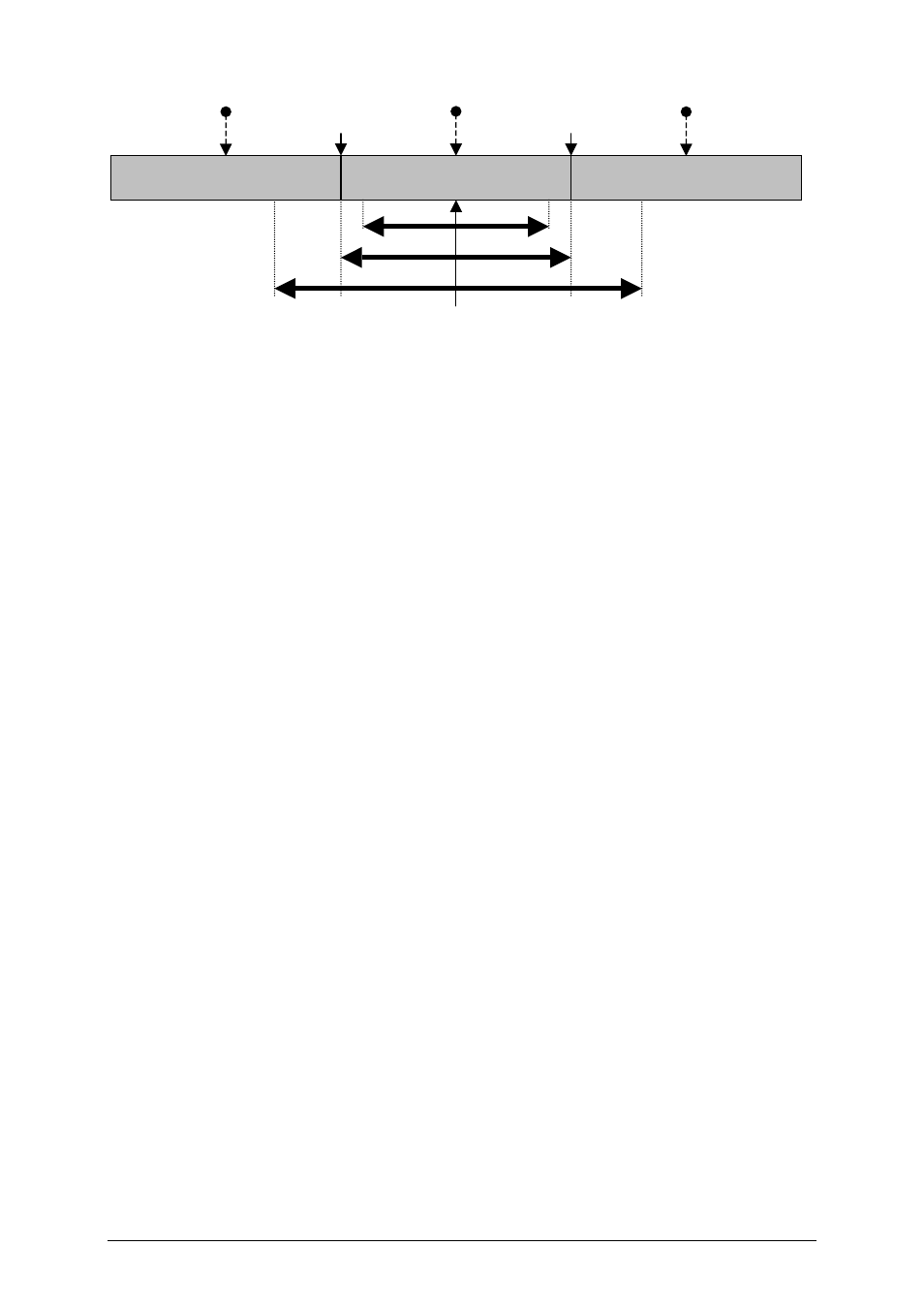
Fig. 9 shows the basic principles for this mode. The grey area is the position sensor.
The position sensor represents a virtual keyboard that is divided into 13, 25, 37, 49 or
61 note areas. The number of note areas depends upon the setting of the parameter
4-2 Number Octave (1 = 13 areas, 2 = 25 areas, 3 = 37 areas and so on). Three of
these note areas labelled "note # -1", "note #" and "note # +1" are shown in fig. 9 in
detail and correspond to three succeeding Midi note messages. The center of each
area is marked with the top arrows. The center is the position that corresponds to the
exact note, i.e. without pitch bend correction. The starting point is marked with the
finger symbol at the bottom of fig. 9. This is the position where the finger touches the
manual in the beginning. To simplify things it is assumed that the starting position
matches exactly with the center position of "note #". Gliding with the finger over the
manual R2M generates transmits only pitch bend messages at first. As soon as the
finger reaches the area of the next lower or upper note the former note is turned off –
i.e. a Midi note off is sent – and the new Midi note on message (i.e. "note # -1" or
"note # +1") followed by the pitch bend correction is sent.
The three bold lines labelled a, b and c in fig. 9 represent the resulting pitch bend
situation in the Midi receiver for three different cases. In case b the pitch bend scale
of R2M and the Midi receiver are matched, i.e. the pitch bend data fit exactly and the
new note is generated without any pitch jump. In case a the pitch bend data cause a
pitch change that is too small. As soon as the area of the new note is reached a small
pitch jump can be heard. Case c is the opposite. The pitch bend data cause a pitch
change that is too high. As soon as the area of the new note is reached a pitch jump
can be heard. In cases a and c the pitch bend scale of the Midi receiver or the R2M
has to be adjusted until no pitch jump is heard when a new note is reached.
In the R2M the parameter 3-4 Pitch scale is responsible for this. A smaller value
decreases the pitch bend data range transmitted by R2M. For case a this value has
to be increased until the desired jump-free pitch change is reached. Alternatively the
pitch scale of the receiver has to be adjusted or even both together to obtain glitch-
free transitions between the note areas. If the maximum value (127) for 3-4 Pitch
scale is reached and the result is not yet satisfactory the pitch scale of the Midi
receiver has to be adjusted. For case c the 3-4 Pitch scale has to be decreased until
the desired jump-free pitch change is reached.
pitch bend - pitch bend +
*
a
c
b
note # - 1
note #
note # + 1
center note # - 1
center note #
center note # + 1
?
?