Travel // weg // course // corsa // recorrido, System // system // système // sistema // sistema – Losi LOSB0019WHTBD User Manual
Page 17
Menu Item
//
Menü Werte
//
Menu
//
voce del menu
//
Menús
dX3S/2S
dX3r Pro dX3r
dX3c
dX3e
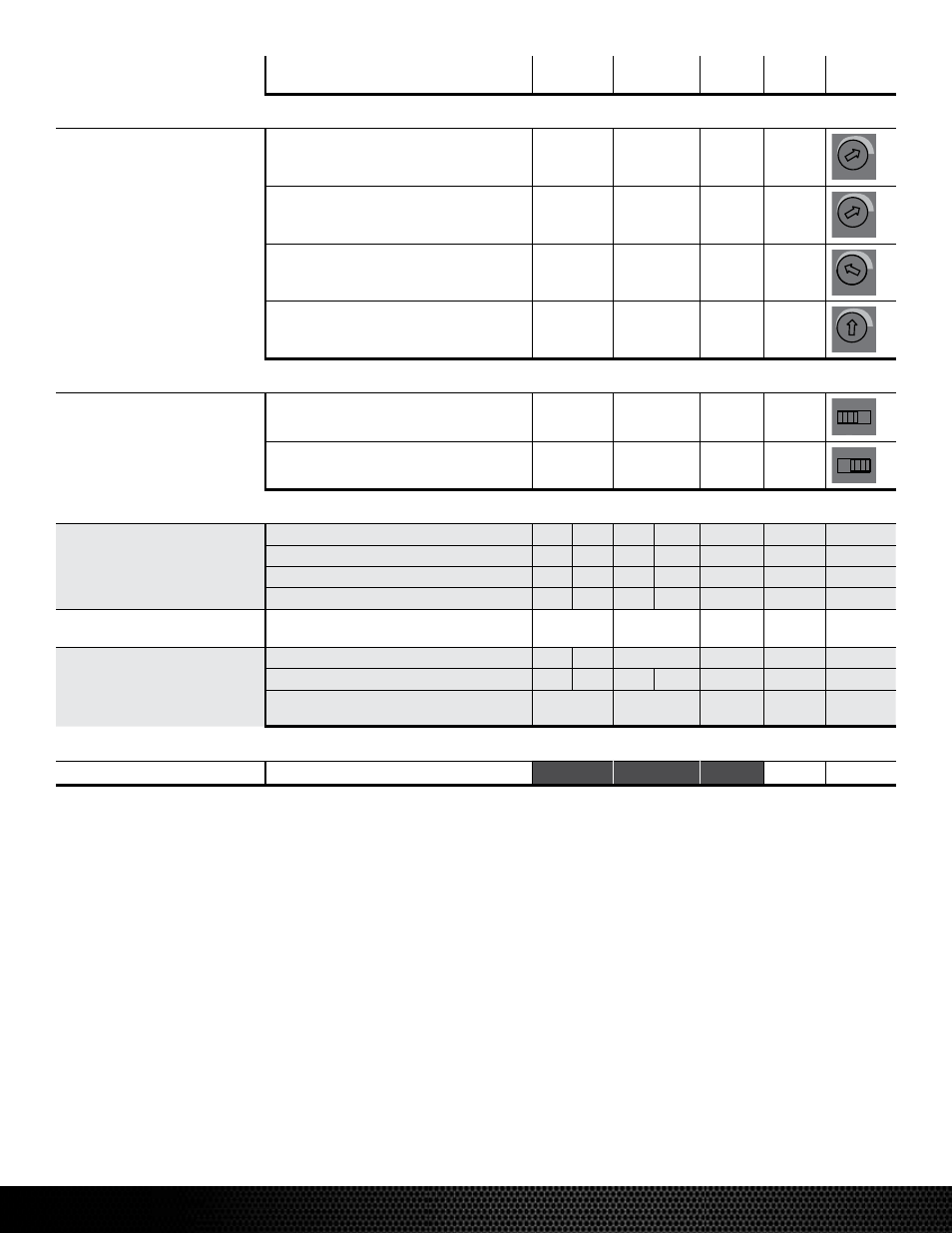
travel // WeG // courSe // corSa // recorrIdo
ST "L"
100%
105%
105%
105%
BIND
TH
ST
AUX
AUX
ST-L
ST-R
TH-F
TH-B
AUX-H
AUX-L
N R
N R
N R
2P 3P LIN
ST "R"
105%
110%
110%
110%
BIND
TH
ST
AUX
AUX
ST-L
ST-R
TH-F
TH-B
AUX-H
AUX-L
N R
N R
N R
2P 3P LIN
TH
50% (B)
50% (L)
50% (L)
50% (B)
BIND
TH
ST
AUX
AUX
ST-L
ST-R
TH-F
TH-B
AUX-H
AUX-L
N R
N R
N R
2P 3P LIN
TH
65% (F)
65% (H)
65% (H)
65% (F)
BIND
TH
ST
AUX
AUX
ST-L
ST-R
TH-F
TH-B
AUX-H
AUX-L
N R
N R
N R
2P 3P LIN
reverSe // ServouMkeHr/reverSe // SenS // reverSe // InverSor
ST
NOR
NOR
NOR
NOR
BIND
TH
ST
AUX
AUX
ST-L
ST-R
TH-F
TH-B
AUX-H
AUX-L
N R
N R
N R
2P 3P LIN
TH
REV
REV
REV
REV
BIND
TH
ST
AUX
AUX
ST-L
ST-R
TH-F
TH-B
AUX-H
AUX-L
N R
N R
N R
2P 3P LIN
teleMetry // teleMetrIe // téléMétrIe // teleMetrIa // teleMetrÍa
Temperature
//
Temperatur
//
Température
//
Temperatura
//
Temperatura
Unit
//
Einheit
//
Unité
//
Unità
//
Unidad
°F
°C
°F
°C
N/A
N/A
N/A
Upper
//
Höchste
//
Supérieur
//
Superiore
//
Máximo
255°
124°
N/A
N/A
N/A
N/A
N/A
Alert
//
Warnung
//
Alerte
//
Vigile
//
Alerta
230°
110°
230°
110°
N/A
N/A
N/A
Lower
//
Tiefste
//
Inférieur
//
Inferiore
//
Mínimo
32°
0°
N/A
N/A
N/A
N/A
N/A
battery
//
akku
//
batterie
//
batteria
//
batería
Alert
//
Warnung
//
Alerte
//
Vigile
//
Alerta
4.5V
4.5V
N/A
N/A
N/A
speed
//
Geschwindigkeit
//
vitesse
//
veloctia
//
velocidad
Zoom
//
Zoom
//
Zoom
//
Zoom
//
Zoom
45
72
N/A
N/A
N/A
N/A
Unit
//
Einheit
//
Unité
//
Unità
//
Unidad
MPH
km/h
MPH
km/h
N/A
N/A
N/A
Roll out
//
Rolllänge
//
Dérouler
//
Roll out
//
Compensación
6.9 in
0.55 ft
N/A
N/A
N/A
SySteM // SySteM // SyStèMe // SISteMa // SISteMa
F RATE
16.5ms
16.5ms
16.5ms
N/A
N/A
Setting the failsafe // einstellen des failsafe // Paramétrage du failsafe // Impostazione del failsafe
// ajuste del failsafe
Failsafe positions are set during binding. Binding is the
process of teaching the receiver the specific transmitter’s
code called GUID (Globally Unique Identifier). In the unlikely
event that the radio link is lost during use, the receiver will
drive the servos to their pre-programmed failsafe positions
(full brakes and straight steering). If the receiver is turned
on prior to turning on the transmitter, the receiver will enter
the fail safe mode, driving the servos to their preset failsafe
positions. When the transmitter is turned on, normal control
is resumed. Failsafe activates only in the event that signal
is lost from the transmitter. Failsafe will NOT activate in the
event that re ceiver battery power goes down or power to the
receiver is lost.
Die Failsafepositionen werden während des Bindens
eingestellt. Bei dem Bindevorgang lernt der Empfänger den
Signalcode GUID (Globally Unique Identifier) des Senders. In
dem unwahrscheinlichen Fall, dass die Verbindung während
des Betriebes verloren geht, fährt der Empfänger die Servos
in die voreingestellte Failsafe Position (normalerweise
Vollbremsung und Lenkung gerade). Gleiches gilt wenn der
Empfänger vor dem Sender eingeschaltet wurde. Wird der
Sender eingeschaltet besteht über den Sender wieder volle
Kontrolle. Die Failsafefunktion wird nur aktiviert wenn das
Signal vom Sender verloren geht. Das Failsafe wird NICHT
aktiviert bei schwachen oder leeren Empfängerakkus.
17
Losi 5ive-T • iNsTrucTioN maNuaL
17
Losi 5ive-T rTr • iNsTrucTioN maNuaL