Kontron PB-TIM2 User Manual
Page 13
PB-TIM2 User’s Manual
Chapter 2 Functional Description
2.2 Board Operation
After power-up, all outputs are passive and all registers are cleared including the interrupt registers. Prescalers are set to
divide by one and the counters are disabled. Input (A) operates as a trigger responding to a rising edge signal, input (B)
operates as a gate that enables the counters when a voltage is applied, input (C) is initialized as a timer clear and the
common clear signal is disabled on all three timers.
Under normal operation, the timers are able to be read transparently with continuous comparisons being made between the
current timer value and zero or a preset value. The timer outputs may be activated if the comparison shows a non-zero
value or may be toggled when the timer passes through zero. The timers may be reloaded with a preset value through the
use of the (A) input; timer operation may be blocked by using the (B) or gate input while the counter(s) may be reset
using the local (C) clear input or common clear.
The software allows the prescaler value(s) to be set; enables or clears the timer(s); defines the edge selection on the trigger
input (A) and whether the (B) gate input is edge or level sensitive. In addition, it gives interrupt authorization on
comparison; zero detect; input (A) or (B) and identifies/clears pending interrupts and configures the timer as a ring
counter; sets the counter direction (up or down) and defines when or from which source the timer should be reloaded.
When accessing the board registers, the piggyback will generate a DTACK on each memory location; reading a location
that is not registered in the address map will produce irrelevant data ($FF). Timer and comparator values are 16-bit and
may be accessed as either 3 consecutive bytes or as 2 consecutive words.
Upon initialization, the process should verify the board’s hardware and software IDs.
2.3 Timer Operating Modes
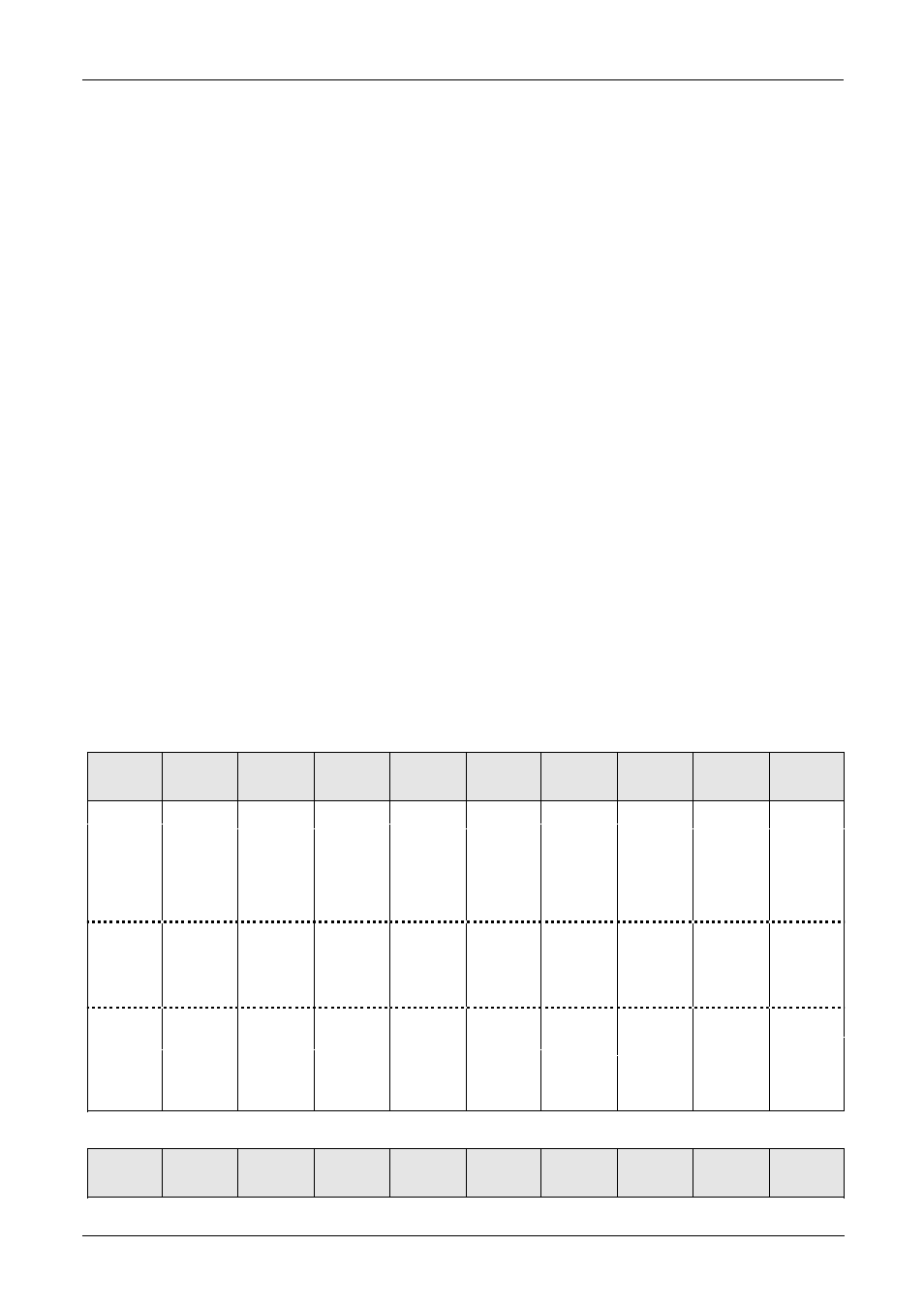
Table 2.3.1 summarizes the timer possibilities indicating the input and output functions, the interrupt possibilities, the
measurement results and the timer modes.
Table 2.3.1 Timer Characteristics
Mode
Timer
Compare
Register
Software
Control
A
B
C
Output
IRQ
Result
Hard
single
shot
Count-
down
stop at 0/
load on
A
Period
Load on
edge
Clear
counter/
output
Passive
if 0
On 0
Soft
single
shot
Count-
down
stop at 0
Software
load
Clear
counter/
output
Passive
if 0
On 0
Tick
Count-
down
load at 0
Period
Enable
counting
Ring
counting
Clear
counter/
output/
Ring
mode
Passive
if 0
On 0
Mode
Timter
Compare
Register
Software
Control
A
B
C
Output
IRQ
Result
July 30, 1997
© 1996 PEP Modular Computers
Page 2-3