Metrohm 815 Robotic USB Sample Processor XL User Manual
Page 60
6.4 Robotic arms
■■■■■■■■■■■■■■■■■■■■■■
52
■■■■■■■■
815 Robotic USB Sample Processor XL
6.1462.060
Robotic arm with holder for a titration head, left-swinging
The arm can be modified to create the desired titration robotic arm by
means of the installation of a titration head 6.1458.xxx.
Material: PP
6.1462.070
Robotic arm with holder for a titration head, right-swinging
The arm can be modified to create the desired titration robotic arm by
means of the installation of a titration head 6.1458.xxx.
Material: PP
6.1462.260
Robotic arm with holder for a titration head, left-swinging,
external
The arm can be modified to create the desired titration robotic arm by
means of the installation of a titration head 6.1458.xxx. The cutout per-
mits movement to external positions near the rack, e.g. an external rinsing
station.
Material: PVC
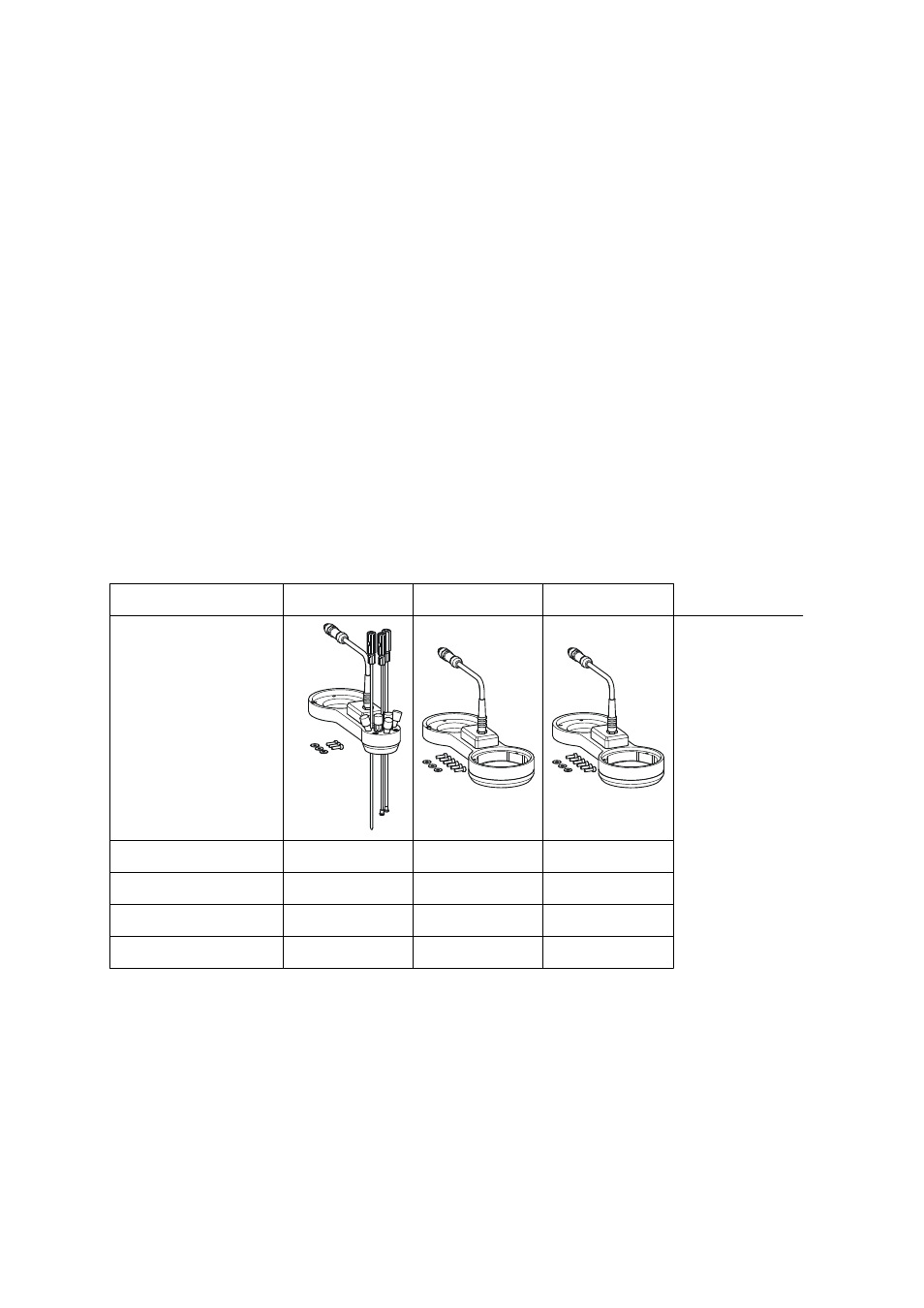
Table 3
Configuration data of the robotic arms with beaker sensor
Type
6.1462.150
6.1462.160
6.1462.170
6.1462.150
6.1462.160
6.1462.170
Swing direction
+/–
+
–
Swing offset
0°
–8°
–8°
Max. swing angle
84°
73°
73°
Swing radius
110 mm
127 mm
127 mm
6.1462.150
Robotic arm with titration head and beaker sensor, left or right-
swinging
For titration in 75 mL sample vessels and larger.