E. motor options, Detect motor direction, Pwm frequency – Pololu Jrk USB User Manual
Page 21: Section 3.e
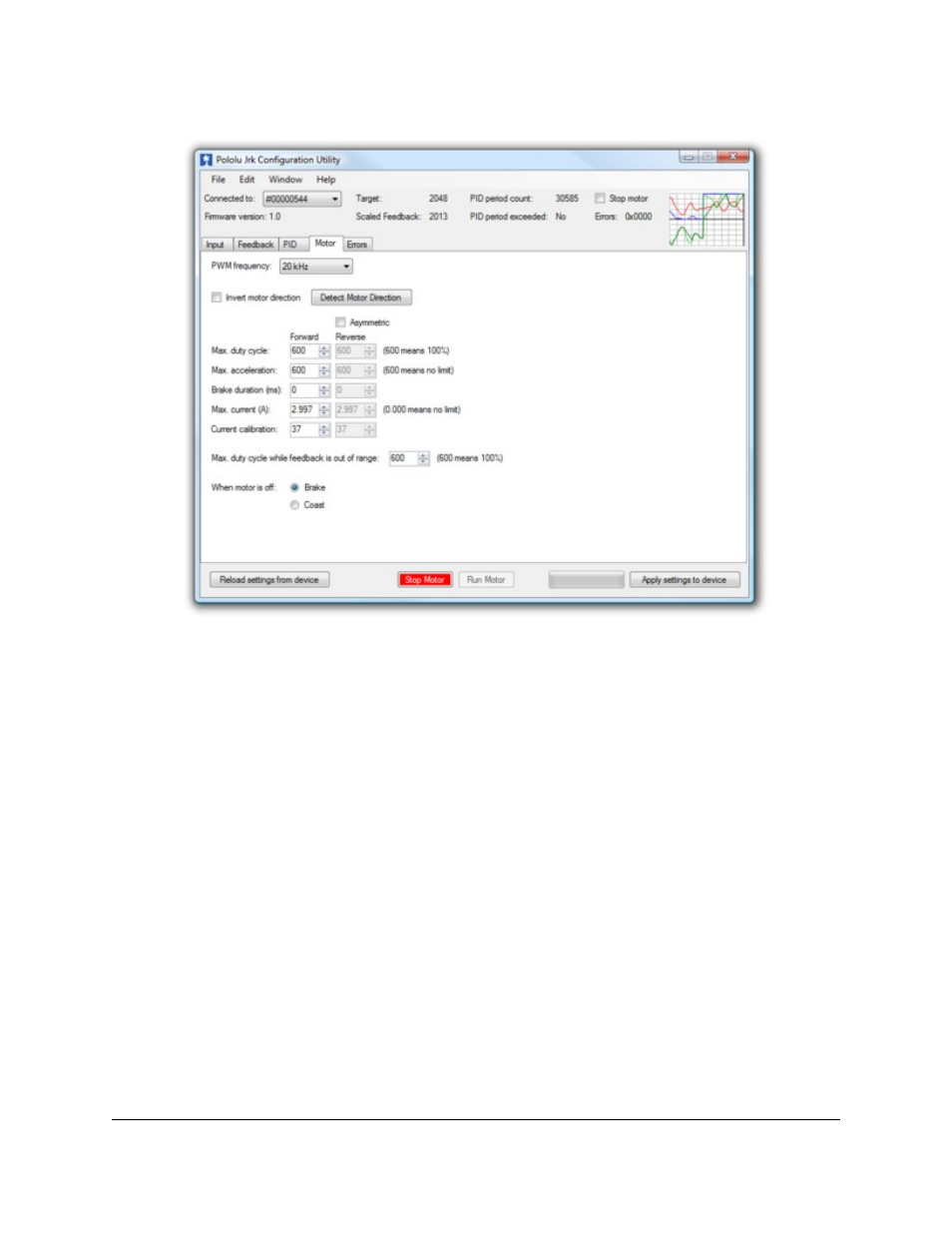
3.e. Motor Options
The Motor tab of the Jrk Configuration Utility
The Motor tab of the jrk configuration utility controls the
signal applied to the motor, including all limits that are applied when converting duty cycle target to duty cycle.
The jrk’s PWM duty cycle has a range of -600 to 600, where -600 is full reverse and 600 is full forward. “Forward”
and “reverse” should be consistent with the scaled feedback values, so that when the duty cycle is positive, the motor
spins in a direction that increases the scaled feedback. By default, full forward (+600) means motor output A = VIN
and B = 0 V, while full reverse (-600) means A = 0 V and B = VIN. When checked, the Invert motor direction option
switches these definitions so that full forward (+600) means A = 0 V and B = VIN, while full reverse (-600) means A
= VIN and B = 0 V.
Detect motor direction
To automatically detect whether the motor is inverted or not, click “Detect Motor Direction”. This will attempt to
drive the motor with a gradually increasing duty cycle until it starts to move, as measured by the feedback. Make sure
to configure feedback correctly before clicking this button, or the results will be meaningless. It is also recommended
to set up low maximum duty cycles and currents, and set the Motor drive error, Feedback disconnect, and Max.
current exceeded errors to be “Enabled and latched”, so that any potentially damaging conditions encountered during
this test will cause the jrk to turn off the motor.
PWM frequency
The jrk is capable of both 20 kHz and 5 kHz PWM. The 20 kHz PWM frequency is ultrasonic and can thus eliminate
audible PWM-induced motor humming, which makes this frequency desirable for typical applications.
Pololu Jrk USB Motor Controller User's Guide
© 2001–2014 Pololu Corporation
3. Configuring the Motor Controller
Page 21 of 45