2 specifications – ElmoMC Multi-Axis Motion Controller-Maestro Installation Guide User Manual
Page 8
Maestro Installation Guide
Introduction
MAN-MASIG (Ver 1.33)
2-2
2.2
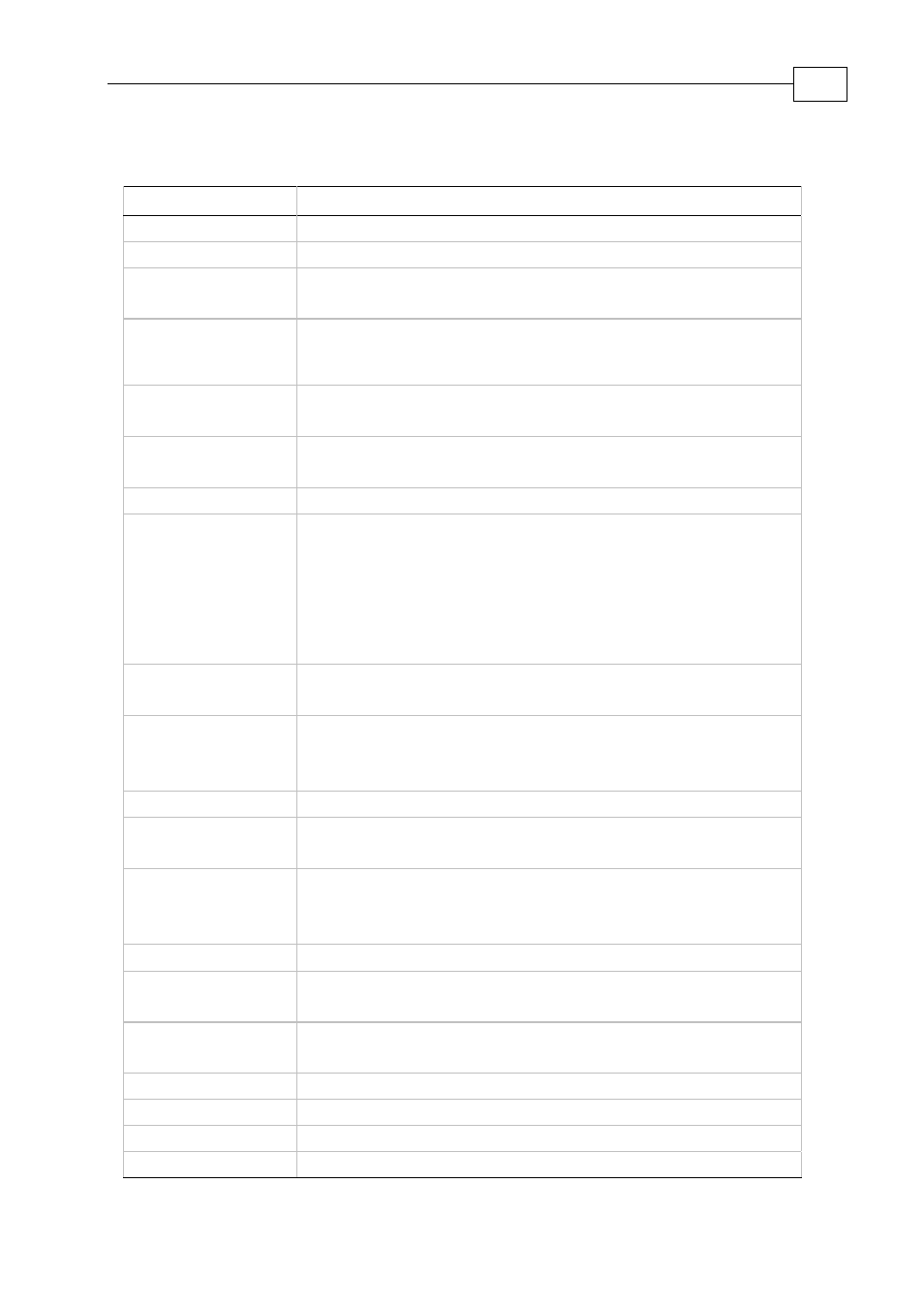
Specifications
Component Specification
Hardware: Stand-alone
Operating System
Real Time OS with Elmo’s Kernel
Programming: Elmo
SimplIQ extended language
Elmo Studio (IDE)
Debugging:
On-line monitoring of all axes state variables, get/set values,
controller values, on-line axis tuning, axis variables forcing,
recording
Number of Axes:
Up to 64 axes per CAN bus
2 X 64 Interpolated axes depending upon bus load
Axis Types:
Intelligent servo drives (Elmo) and/or
CANopen DSP 402
Execution Time:
Interpolated points: 1 mSec
Axis Functions:
Standard:
start/stop/reset/
reference, velocity, position
Special:
electronic gearings
interpolated
position
Protocols:
CANopen: DS 301, DSP 401 , DSP 402
Telnet
I/O System:
On board optically isolated 8 Digital Inputs and 8 Digital Outputs
4 differential Analog Inputs
Incremental encoder 40 Mega-Counts/Second
Connectivity: Variable
access via Maestro API
Master: Heartbeat
NMT Synchronization
Interface: RS-232
Fast Ethernet (10/100 Mbps)
2 CAN bus
Power Supply:
24 VDC ±20%
Processor:
300 MHz, Pentium compatible
16 bit ISA (PC104 standard)
Memory:
64 MB Internal flash
64 MB RAM (both expandable to 128 MB)
Diagnostic LEDs:
Power, LAN Link, LAN Activity, Flash Access
Dimensions:
153 mm x 107 mm x 51 mm
Weight:
400 grams ( 14 ounces)
Operational. Temp.:
0°C ~ 40°C