3 canopen communication – ElmoMC Multi-Axis Motion Controller-Maestro Installation Guide User Manual
Page 19
Maestro Installation Guide
Installation
MAN-MASIG (Ver 1.33)
3-9
3.4.3
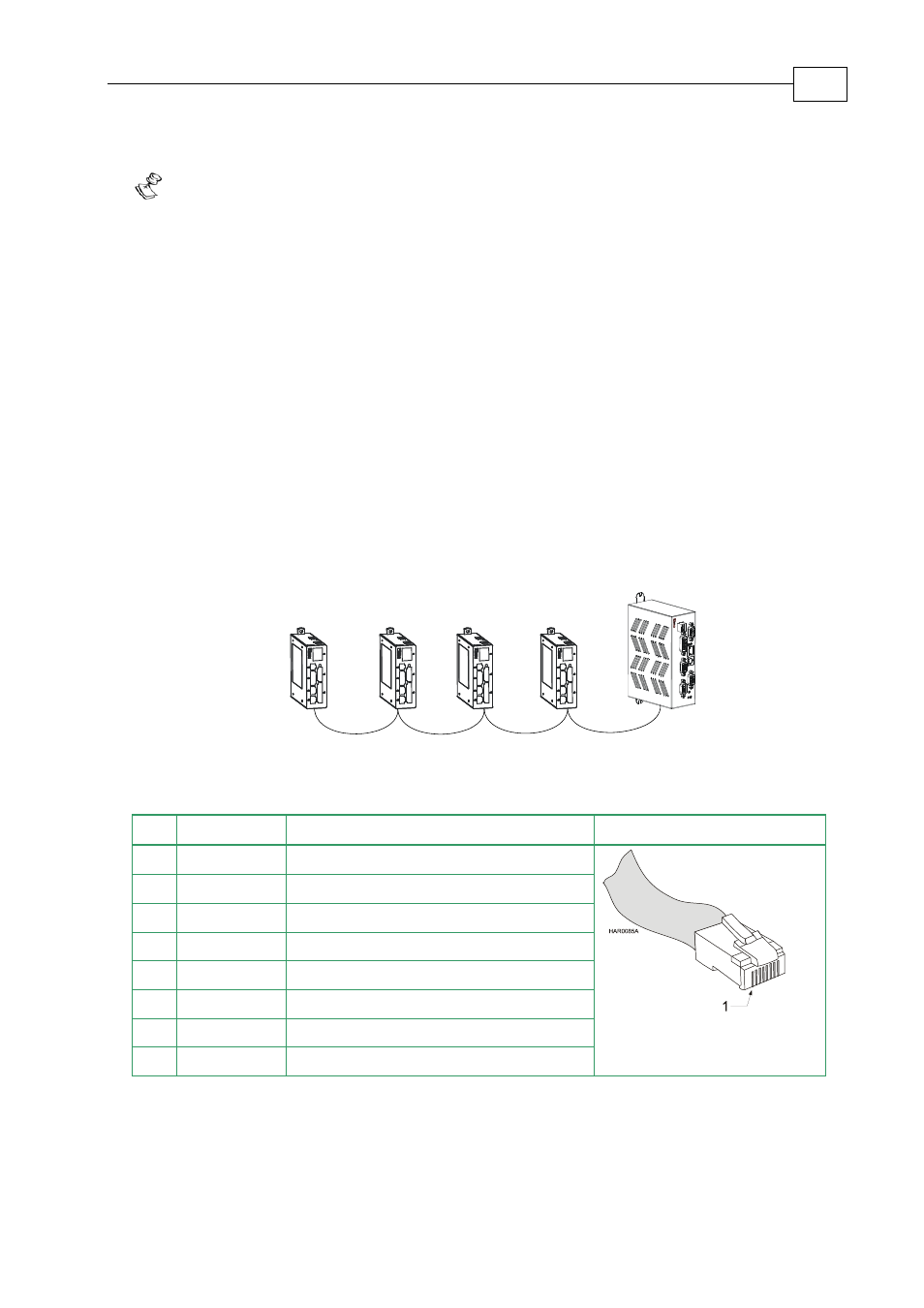
CANopen Communication
Notes for connecting the CANopen communication cable:
Use 26 or 28 AWG twisted pair shielded cables. For best results, the shield should have
aluminum foil and covered by copper braid with a drain wire (CAT5 FTP applicable).
Connect the shield to the ground of the host (PC). Usually, this connection is soldered
internally inside the connector at the PC end. You can use the drain wire to facilitate
connection.
The male RJ plug must have a shield cover.
Ensure that the shield of the cable is connected to the shield of the RJ plug. The drain wire
can be used to facilitate the connection.
Connect a 120-ohm termination resistor to each end of the network cable.
(The Maestro does not have an internal terminal.)
Termination resistors should be installed in all the unused CAN ports on the Maestro.
Use the CAN termination dongle supplied as a second “device end”. Simply insert the
termination resistor into the CAN connector of the second end device on the bus. This is
only possible if there are two CAN connectors.
External
Termination
12
0
Ω
Nodes
Maestro
External
Termination is
Necessary
Figure 3-4: Connecting a 120-ohm termination resistor to each end of the network cable
Pin Signal
Function
Pin
Position
1
CAN_H
CAN_H bus line (dominant high)
2
CAN_L
CAN_L bus line (dominant low)
3 CAN_GND CAN
ground
4 —
—
5 —
—
6 CAN_SHLD Shield, connected to the RJ plug cover
7 CAN_GND CAN
Ground
8 —
—
Table 3-6: CANopen Cable - Pin Assignments