Ya[4]=2) – ElmoMC AC Input Digital Servo Drives-Tuba User Manual
Page 43
Tuba Installation Guide
Installation
MAN-TUBIG (Ver. 1.502)
43
3.4.7.2.
Differential Auxiliary Encoder Input Option on FEEDBACK B (YA[4]=2)
The Tuba can be used as a slave by receiving the position of the master encoder data (on Port
B1) in Follower or ECAM mode. In this mode Port B2 provides differential buffered auxiliary
outputs for the next slave axis in follower or ECAM mode.
Below are the signals on the Auxiliary Feedback port when set up to run as a differential
auxiliary encoder input:
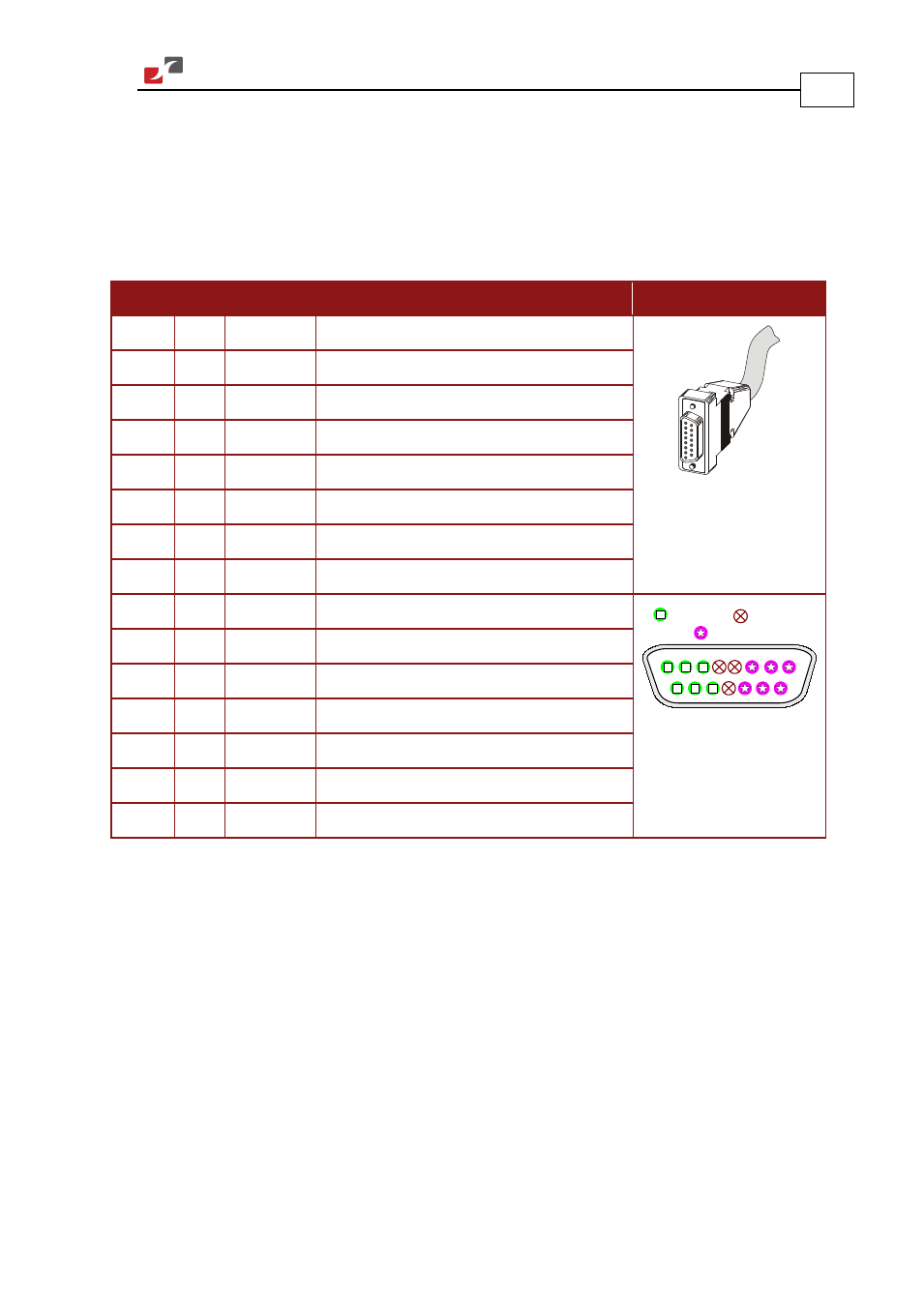
Port
Pin Signal
Function
Pin Positions
B1
1
INDEX
Auxiliary Index high input
COR016A
15-Pin D-Sub Socket
B1
2
CHB
Auxiliary Channel B high input
B1
3
CHA
Auxiliary Channel A high input
PWR
4
+5V
Encoder supply voltage
PWR
5
SUPRET
Encoder Supply return
B2
6
CHAO
Buffered Channel A output
B2
7
CHBO
Buffered Channel B output
B2
8
INDEXO
Buffered Index output
B1
9
INDEX-
Auxiliary Index low input
8
15
1
9
Port B1
Power
Port B2
15-Pin D-Sub Plug
on Tuba
B1
10 CHB-
Auxiliary Channel B low input
B1
11 CHA-
Auxiliary Channel A low input
PWR
12 SUPRET
Supply return
B2
13 CHAO-
Buffered Channel A complement output
B2
14 CHBO-
Buffered Channel B complement output
B2
15 INDEXO-
Buffered Index complement output
Table 7: Differential Auxiliary Encoder Input Option on FEEDBACK B
Pin Assignments
FEEDBACK B on the front of the Tuba has a 15-pin D-Sub plug. Connect the Auxiliary Feedback
cable from the feedback device to FEEDBACK B using a 15-pin D-Sub socket with a metal
housing. When assembling the Auxiliary Feedback cable, follow the instructions in Section 3.4.4
(Feedback and Control Cable Assemblies).