Feedback and analog input, Feedback port a – ElmoMC Gold Line Digital Servo Drives-Gold Solo Trombone User Manual
Page 57
Gold Solo Trombone Installation Guide
Installation
MAN-G-SOLTROIG (Ver. 1.3)
57
4.9. Feedback and Analog Input
The Gold Solo Trombone has two configurable motion sensor input ports: Port A and Port B,
and one emulated buffered output port: Port C. Motion sensors from the controlled motor and
from other sources can be connected to any of the available inputs on either port A or B.
Software configuration designates each input a role, e.g., the incremental encoder on port B is
the controlled motor position feedback, the Hall sensors on port A are commutation feedback,
and the incremental encoder on port A is follower input.
For more information about sensors and their use refer to the Gold Line Software Manual.
4.9.1.
Feedback Port A
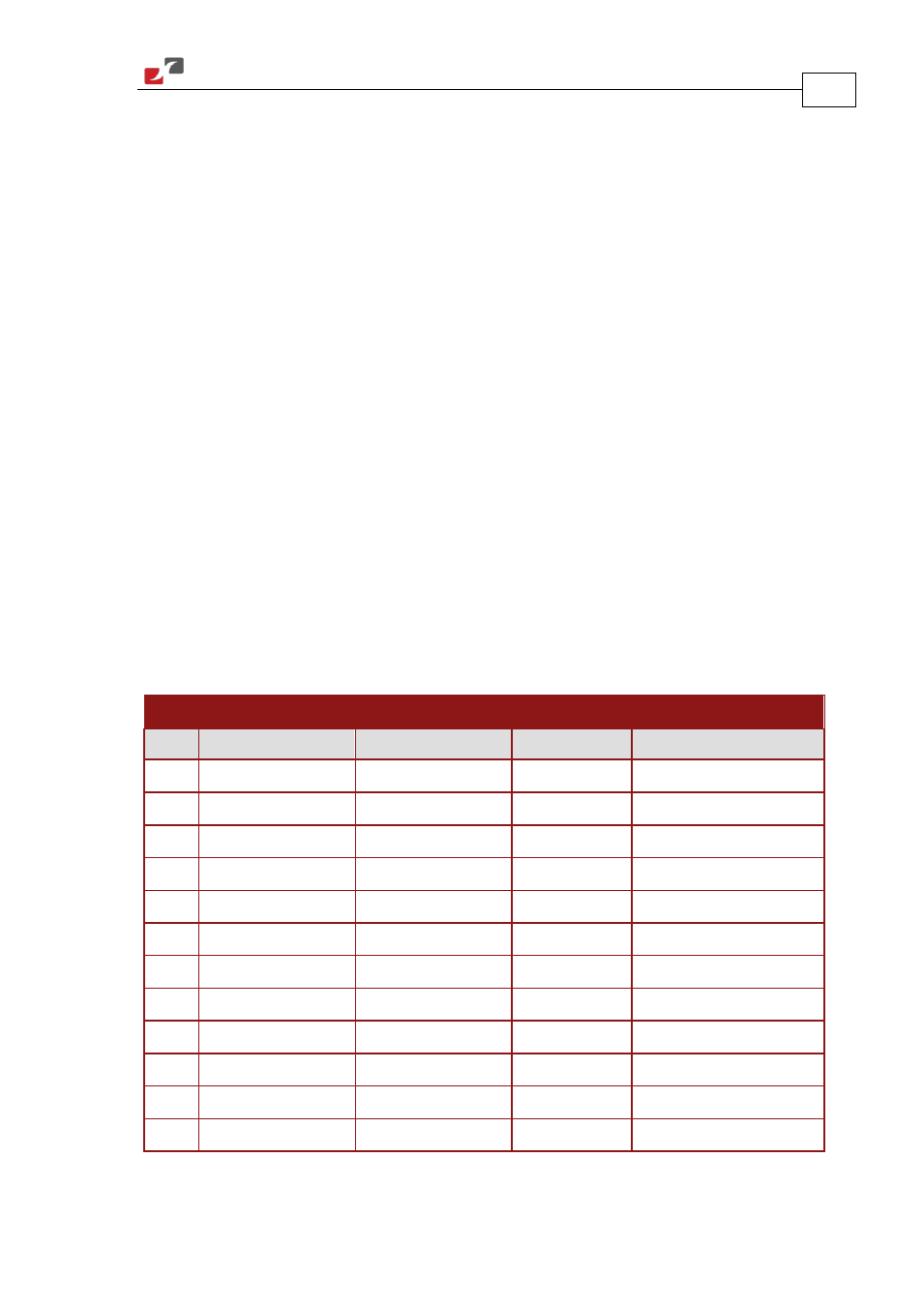
Port A supports the following sensor inputs:
• Digital Hall sensors
• Incremental encoder or absolute serial encoder, depending on the specific model
Differential pulse-width modulation (PWM) signal input can be connected to port A in the
models that support input from an incremental encoder. The PWM signal can be connected to
the applicable pair of matching + and – encoder channels and is configurable by software.
Differential Pulse & Direction signal inputs can be connected to port A in the models that
support input from an incremental encoder. The signals can be connected to the applicable pair
of matching + and – encoder channels and are configurable by software.
A cable kit containing a cable that connects to port A is available. See Section 5.1.11.
Incremental Encoder
Absolute Serial Encoder
Pin
Signal
Function
Signal
Function
1
+5V
Encoder +5V supply
+5V
Encoder +5V supply
2
SUPRET
Supply return
SUPRET
Supply return
3
PortA_ENC_A+
Channel A +
ABS_CLK+
Absolute encoder clock+
4
PortA_ENC_A-
Channel A -
ABS_CLK-
Absolute encoder clock-
5
PortA_ENC_B+
Channel B+
ABS_DATA+
Absolute encoder data +
6
PortA_ENC_B-
Channel B -
ABS_DATA-
Absolute encoder data -
7
PortA_ENC_INDEX+
Index+
Reserved
Reserved
8
PortA_ENC_INDEX-
Index -
Reserved
Reserved
9
HA
Hall sensor A
HA
Hall sensor A
10
HB
Hall sensor B
HB
Hall sensor B
11
HC
Hall sensor C
HC
Hall sensor C
12
COMRET
Common Return
COMRET
Common Return