Diagnostics, 1 trouble code reporting, 2 trouble codes – Pulsafeeder Pulsar ECA NEMA7 User Manual
Page 19
13
5. DIAGNOSTICS
5.1 Trouble Code Reporting
The ECA is designed to be as fault tolerant and self-recovering as possible. However, should certain
conditions occur which make proper operation impossible, it is important to be able to diagnose the
cause of the problem.
When the ECA encounters an abnormal condition, a trouble code is indicated using the CAL LED’s
as follows:
1. Both LED’s will blink once.
2. The Cal Input LED will blink some number of times to signal the first trouble code digit.
3. The Cal Output LED will blink some number of times to signal the second trouble code
digit.
This sequence will repeat until the trouble condition is cleared.
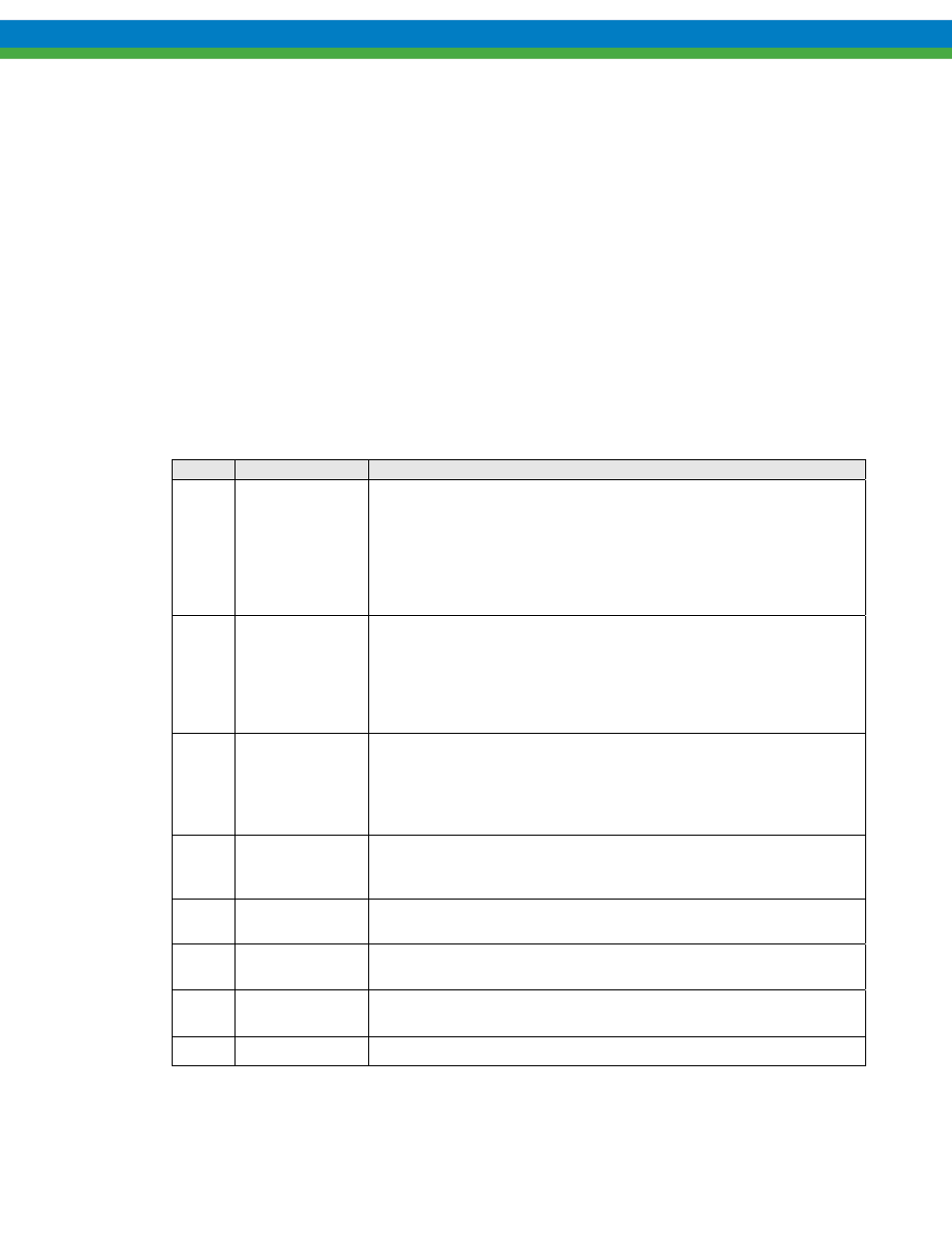
5.2 Trouble
Codes
Code
Description
Definition
11
or
12
Encoder Error
The CPU failed to read an encoder pulse, or has not received the expected
signals in a certain amount of time. Thus, the controller has lost its zero
reference. It then attempts to recover by doing a mechanical zero
calibration. If the mechanical zero calibration is successful, this error is
cleared, and normal operation continues. If further errors prevent successful
mechanical zero calibration, this error is a fatal error and requires user
intervention. Cleared by cycling power.
13
Position Error
Failure to reach commanded position within the timeout period (5 minutes).
After 10 minutes, the error will clear and the controller will automatically
retry the position adjustment. If the error continues to occur for ten
consecutive times, no further retries will be attempted, and the error will
become a fatal error requiring user intervention. The error can be cleared by
cycling power.
14
Over Temperature
The motor thermistor indicates the motor case temperature has reached
approximately 90
C (194F). This will stop motor operation until the motor
case temperature drops below approximately 80
C (176F), when it will
clear automatically. This insures that motor duty cycle is not excessive in
high ambient temperature situations.
21
Signal Loss
The Analog input signal dropped more than 0.3 mA below the low cal point.
This error clears automatically when the analog input signal returns to
normal.
22
Self-Test Signal
Error
The Analog output signal and analog input signal at 0% stroke position do
not agree (refer to Self-Test Mode description for further details).
23
Self-Test Signal
Error
The Analog output signal and analog input signal at 100% stroke position do
not agree (refer to Self-Test Mode description for further details).
24
Self-Test
Thermistor Error
Thermistor readings are not within specifications. Contact factory for
assistance.
33
Self-test passed
Refer to Self-Test Mode description for additional information.