3 impostazione protocollo ricevitore, 4 impostazione ausiliario come wiper, 6 inserimento del carico nella linea rs485 – Videotec DTMRX2 User Manual
Page 16
Pag. 12
MNVCDTMRX2_0351
7.3 Impostazione protocollo ricevitore
Il ricevitore DTMRX2 (DTMRX224) può operare con quattro tipi di protocollo diverso. Impostare di dip switch 3 e
4 di SW1 in base al tipo di protocollo desiderato e facendo riferimento alla seguente tabella:
Dip 3
Dip 4
Protocollo
OFF
OFF
MACRO*
OFF
ON
Videotec
ON
OFF
Pelco D
ON
ON
COAX
* Impostazione di default
Protocollo Pelco D: il ricevitore imposta una velocità di comunicazione pari a 2400 baud, indipendentemente
da ciò che si è impostato nei dip 1 e 2 di SW1.
7.4 Impostazione ausiliario come Wiper
Il ricevitore DTMRX2 (DTMRX224) consente di impostare il contatto Ausiliario (AUX) con funzionalità di Wiper
(funzione attivabile solo da tastiere DCJ e DCT).
Normalmente il contatto Ausiliario viene attivato dalle tastiere con il comando Aux 1 e disattivato ancora con
Aux 1. Se è attivata la modalità Wiper, il contatto ausiliario funzionerà solo mediante pressione del tasto Wiper
(tergicristallo). Al rilascio del tasto Wiper il contatto viene a mancare.
L’impostazione va fatta sul dip 8 di SW2 secondo la seguente tabella:
Dip 8
Funzione Aux1
OFF
Aux1*
ON
Wiper
* Impostazione di default
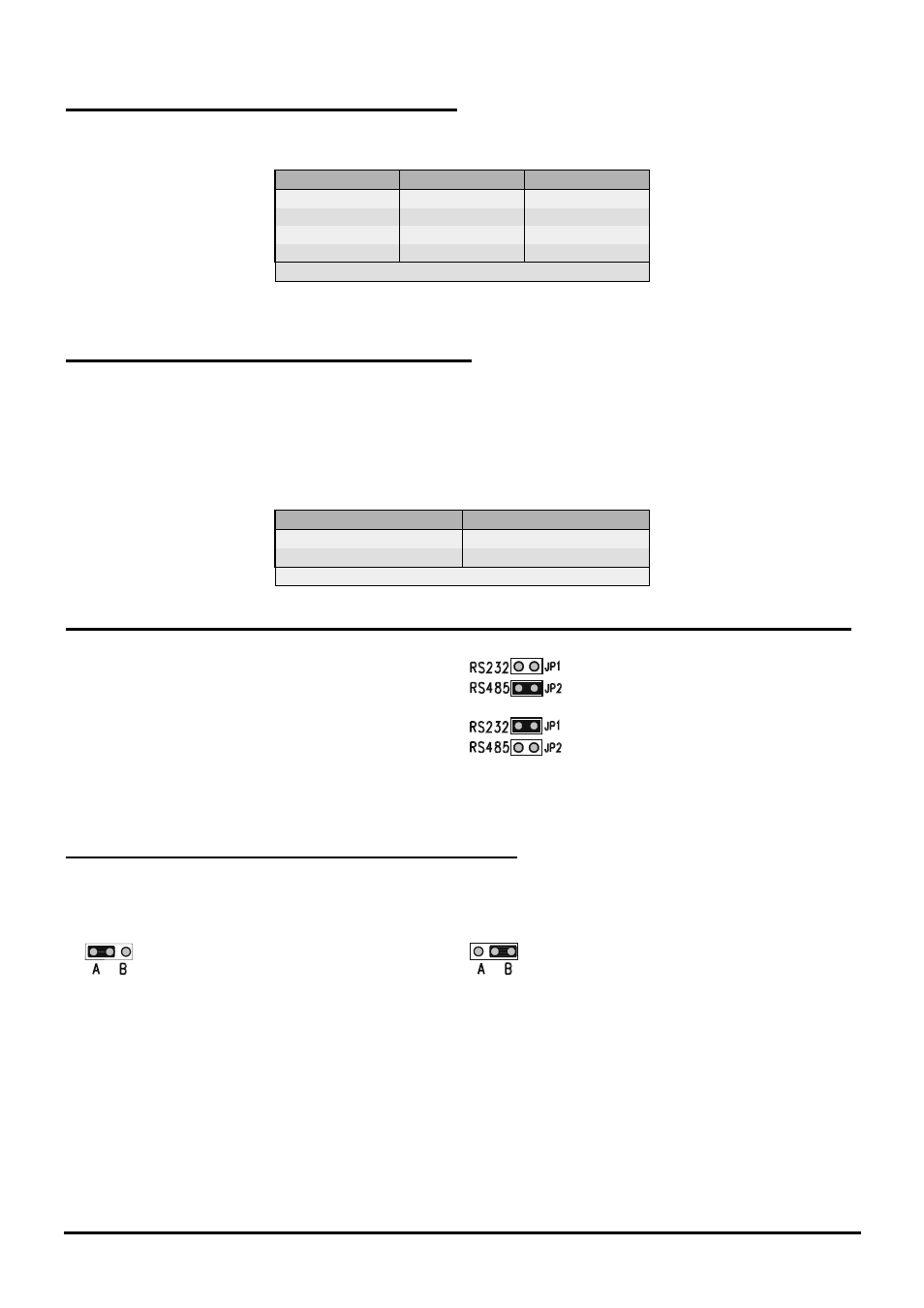
7.5 Impostazione della modalità di ricezione del ricevitore (RS232/RS485/COAX)
Impostazioni Jumper JP1 e JP2 per ricezione RS485:
Impostazioni Jumper JP1 e JP2 per ricezione RS232:
Per la ricezione COAX (telemetria su cavo coassiale) è sufficiente impostare i dip switch 3 e 4 di SW1 come
indicato nel paragrafo Impostazione protocollo ricevitore.
7.6 Inserimento del carico nella linea RS485
NOTA: Questa impostazione è necessaria solo se si utilizza una linea di comunicazione RS485.
Per la configurazione dei Jumper JP3 e JP4, fare riferimento alle seguenti impostazioni:
Jumper in posizione A
Jumper in posizione B
Impostazioni:
JP3 in posizione A: carico inserito in trasmissione RS485.
JP3 in posizione B: carico disinserito in trasmissione RS485.
JP4 in posizione A: carico inserito in ricezione RS485.
JP4 in posizione B: carico disinserito in ricezione RS485.