PASCO ME-6828 Dynamics Cart Magnetic Damping User Manual
Page 10
®
D y n a m i c s C a r t M a g n e t i c D a m p i n g
E x p e r i m e n t 3 : P r e d i c t i n g T e r m i n a l Ve l o c i t y
10
Equation 3 assumes that magnetic drag is the only source of friction. A real cart is
also affected by friction that is not proportional velocity, but is constant as long as the
cart is moving. If this additional frictional force is
f
0
, then the net force on the cart is
(eq. 4)
and
(eq. 5)
The addition of
f
0
does affect the slope of the
v versus a graph, but it does add a ver-
tical offset (or “Y-intercept’) equal to
.
In this part of the experiment, you will use the motion sensor to record
v and a as the
cart slows down after you push it on a level track.
Set-up
1.
Make the track level.
2.
Attach a motion sensor to the left end of the track.
3.
Attach the Magnetic Damping Accessory to the cart.
4.
If you are using a plastic cart, add about 250 g of mass, so that the total mass is
about 500 g. (Additional mass is not necessary with a metal cart.)
5.
Place the cart on the track with the Magnetic Damping Accessory away from the
motion sensor.
6.
Adjust the magnets to be about 1 mm above the track. Check to make sure that
the magnets do not touch the track when you push the cart swiftly.
Important: After you have adjusted the magnets, do not readjust them for the remainder of the
experiment.
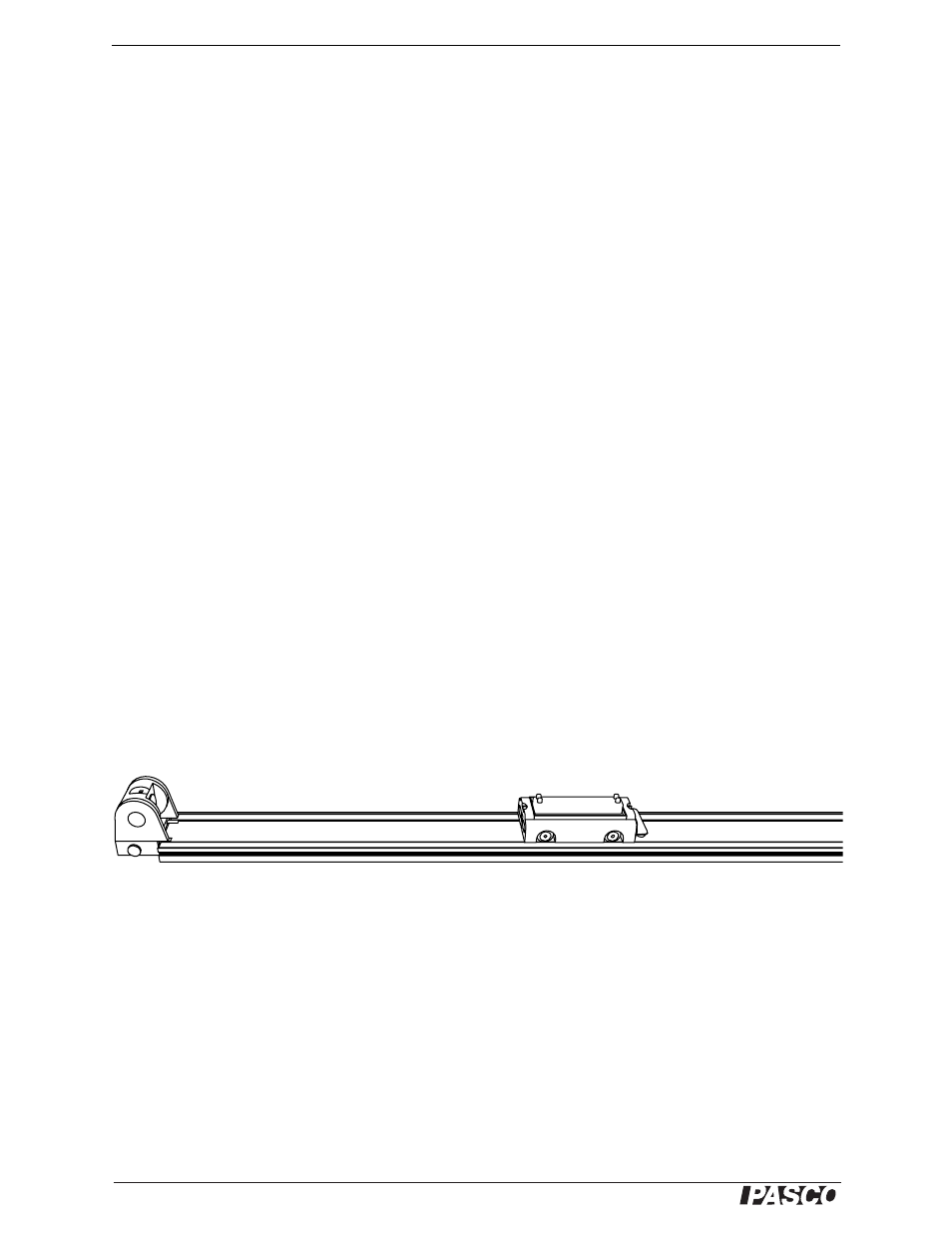
Experiment set-up for Terminal Velocity, Part I
Sensor, Interface, and Software Set-up
For detailed information about setting up your motion sensor, interface, and software, refer to the
instructions supplied with those products.
1.
Connect the sensor to your interface.
2.
Prepare a graph (or graphs) to display Position, Velocity, and Acceleration versus
time.
3.
Take some test data and adjust the sensor so that it can measure the cart’s position
up to a distance of about 1 m. Delete the test data.
Leave the sample rate at the motion sensor’s default of 10 Hz.
F
net
ma
bv
–
f
0
–
=
=
for
v
0
>
(
)
v
m
b
----- a
–
f
0
b
----
–
=
f
0
b
⁄
–