Multichannel Systems Roboocyte2 Scripting Manual User Manual
Page 23
Appendix
23
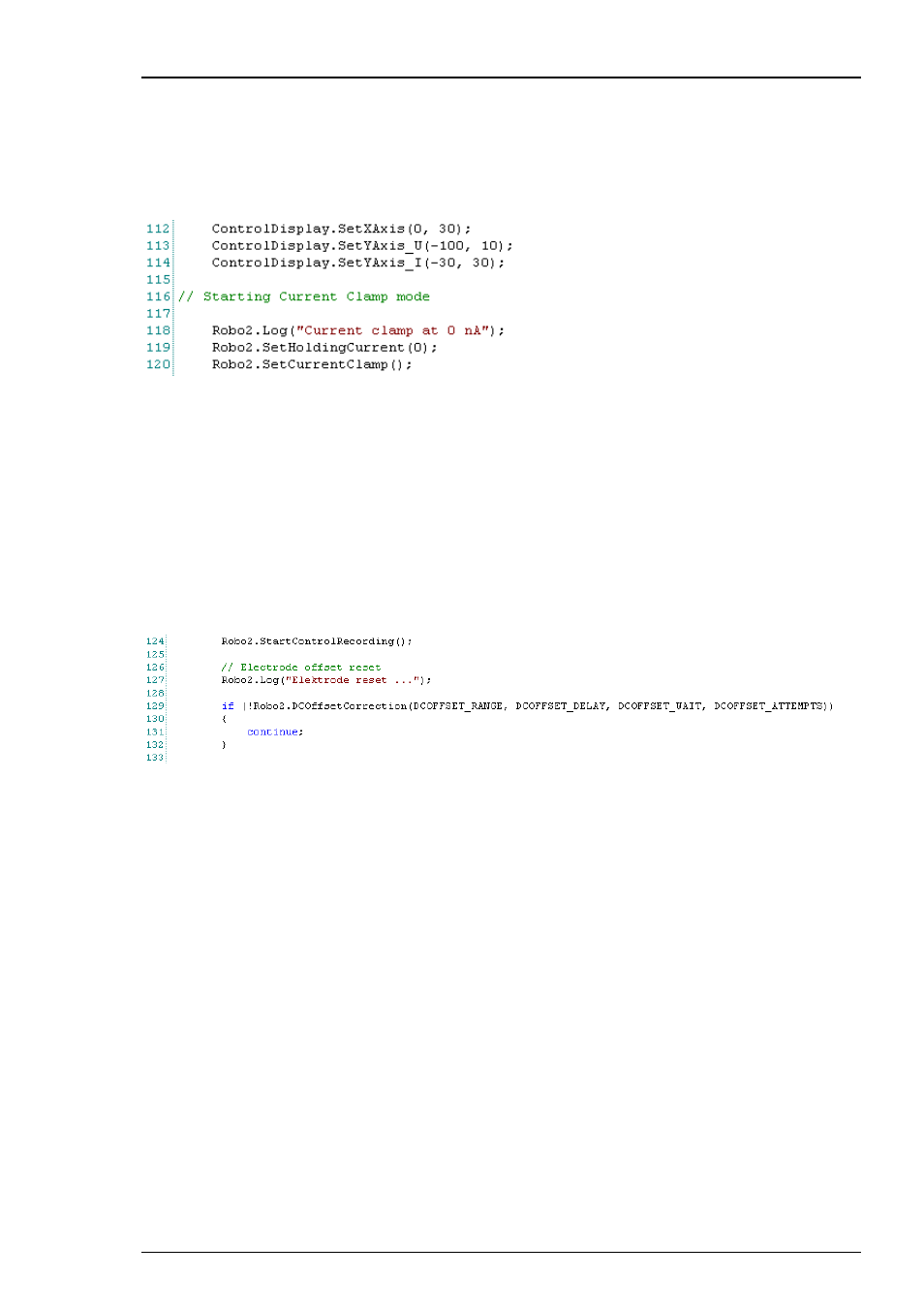
2.3.2 Switching to Current Clamp Mode
After moving the electrodes into liquid, the amplifier is set to Current Clamp Mode.
Robo2.SetHoldingCurrent(0); sets holding current to 0 nA
Robo2.SetCurrentClamp(); sets the amplifier to current clamp mode
Before starting control recording, scaling of the Control Display axes is performed. Units are
seconds, mV and nA, respectively.
2.3.3 Electrode Offset Compensation
After starting current clamp, control recording is started in order to perform electrode offset
compensation, to determine electrode resistances, and to perform the impalement of the oocyte.
Control recording means that data are displayed in the Control Display, but not saved to disk.
Robo2.StartControlRecording() starts the control recording followed by the electrode offset
compensation.
The offset compensation for both electrodes is performed by executing the command
Robo2.DCOffsetCorrection(DCOFFSET_RANGE, DCOFFSET_DELAY, DCOFFSET_WAIT,
DCOFFSET_ATTEMPTS)
Variables for the offset compensation are by default the designated predefined variables, but you
can also use numbers, such as Robo2.DCOffsetCorrection(3, 10, 5, 3) (see table in chapter 1.2.3)
The command is embedded in an if-loop, controlling what happens after the compensation: If the
electrode offset compensation was successful the script proceeds, if not, the measuring head
moves to the next oocyte.
The if loop is terminated by "continue" if the electrode offset compensation fails. "Continue"
means that the script jumps back to the start of the respective loop (oocyte loop in this case).
2.3.4 Electrode Resistance Test
After compensating the electrode offsets, the resistance of both electrodes should be tested with
the command
Robo2.ResistanceCheck_I(MIN_RESISTANCE_I, MAX_RESISTANCE_I),
where MIN_RESISTANCE and MAX_RESISTANCE are predefined variables (see table in chapter
1.2.3).