Gm 3 – R&M Materials Handling VARIABLE SPEED CONTROLS ControlMaster Elite Manual User Manual
Page 12
R&M Materials Handling, Inc.
4501 Gateway Boulevard
Springfield, Ohio 45502
!
: (937) 328-5100
FAX: (937) 325-5319
12/31
R&M Materials Handling, Inc. reserves the right to alter or amend the above information without notice.
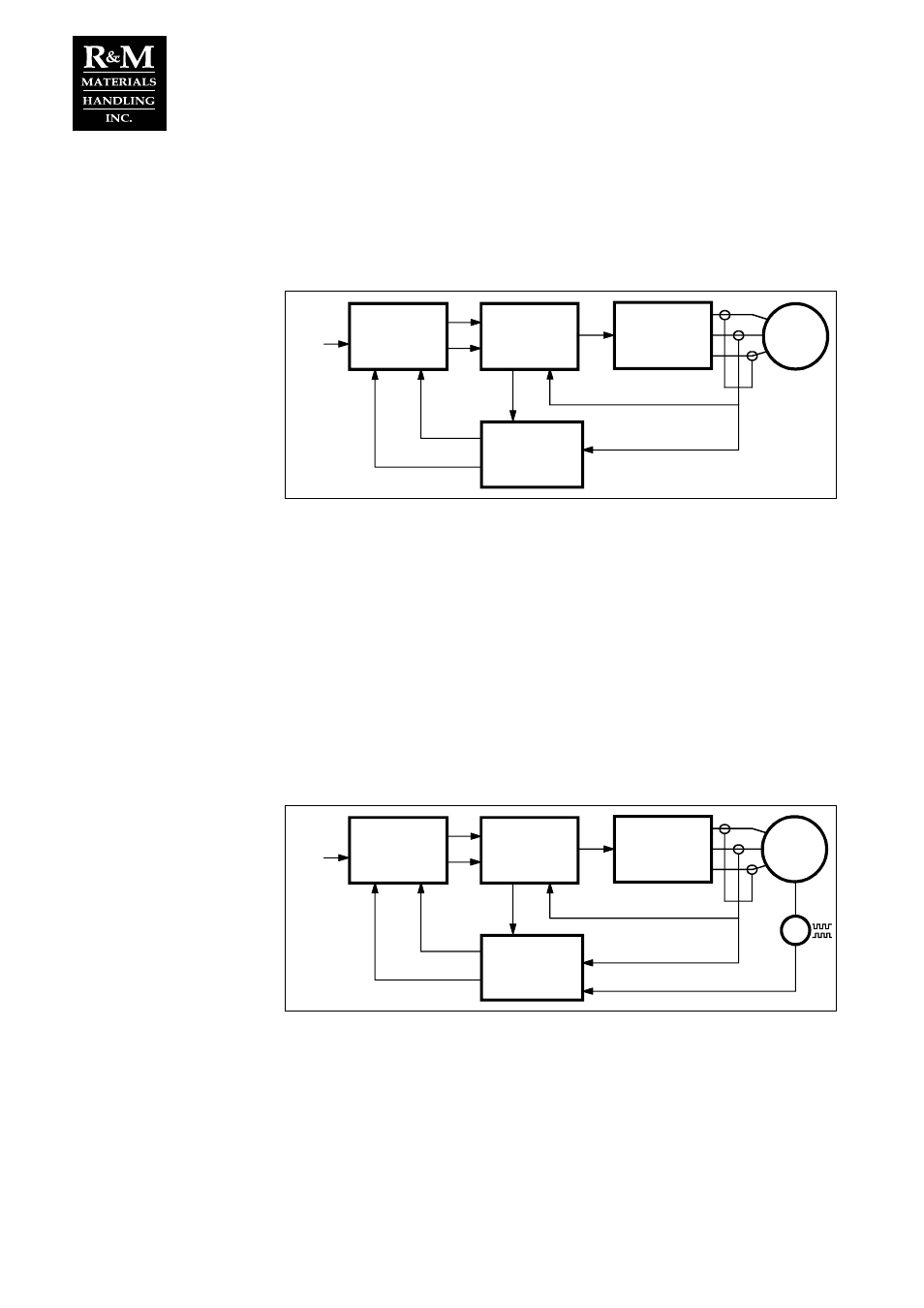
1.9 Motor control modes
Open loop
D2H and D2C have a built-in motor model, which calculates - one thousand times in a second - the
values of the real motor. The input data needed for the calculation is the instantaneous value of the
motor voltage from the ASIC and the measured motor current. Motor magnetic flux and shaft torque are
calculated in the motor model based on the nameplate data of the motor.
Open loop
vector control
Speed
ref
Inverter
Asic
Current
Vector
calculation
Speed
Control
Torque
Flux
ref
M
3
~
Frequency control
Open loop (mode 0)
In frequency control mode of Open Loop, the motor frequency follows the frequency
reference signal. The actual rotating speed depends on load and is equal to the slip
below or above the output frequency. Even with frequency control, the vector calculation
is used to keep the magnetization at a correct level.
Current control
Open Loop (mode 1)
In current control mode of Open Loop, the motor follows the frequency reference signal.
The motor is current controlled in small frequencies (typically <10Hz) and in higher
frequencies the motor is voltage controlled. The current control ensures that in small
frequencies the speed of the motor is almost independent of the load.
Closed loop
The closed loop vector control also includes a motor model, which has even a more simple configuration
than the open loop vector control. This is because an additional input data, as the signal from the
incremental encoder is available. This measurement of the function of the actual motor is used as
feedback to the motor model calculation and allows possibilities for additional checking of the motor
control.
Closed loop vector
control
Speed
ref
Inverter
Asic
Current
Vector
calculation
Speed
Control
Torque
Flux
ref
Speed
G
M
3
~
Speed control
Closed loop (mode 3)
In speed control mode of Closed Loop, the motor speed follows the speed reference
signal. D2H and D2C adjust the motor frequency and with this function compensate the
load-dependent slip. The slip compensation keeps the actual shaft speed constant and
independent of loading conditions. With the closed loop speed control it is even possible
to reach zero speed with full torque.
Torque control
Closed loop (mode 4)
In torque control mode, the shaft torque is kept equal to the reference signal. The motor
speed depends very much on loading conditions - for example, an unloaded motor would
run at full speed all the time. For safety reasons, the speed is limited between adjustable
minimum and maximum speeds.