Data output register access – Rainbow Electronics DAB-IMU-C01 User Manual
Page 12
ADIS16250/ADIS16255
Rev. B | Page 12 of 20
DATA OUTPUT REGISTER ACCESS
The ADIS16250/ADIS16255 provide access to calibrated
rotation measurements, relative angle estimates, power supply
measurements, temperature measurements, and an auxiliary
12-bit ADC channel. This output data is continuously updating
internally, regardless of user read rates. The following bit map
describes the structure of all output data registers, except
ENDURANCE, in the ADIS16250/ADIS16255.
Table 5. Register Bit Map
MSB
LSB
ND EA D13 D12 D11 D10 D9 D8
D7 D6 D5 D4 D3 D2 D1 D0
The MSB holds the new data (ND) indicator. When the output
registers are updated with new data, the ND bit goes to a 1 state.
After the output data is read, it returns to a 0 state. The EA bit is
used to indicate a system error or an alarm condition that can
result from a number of conditions, such as a power supply that
is out of the specified operating range. See the Status and
Diagnostics section for more details. The output data is either
12 bits or 14 bits in length. For all of the 12-bit output data,
Bit D13 and Bit D12 are assigned don’t care status.
The output data register map is located in Table 6 and provides
all of the necessary details for accessing each register’s data.
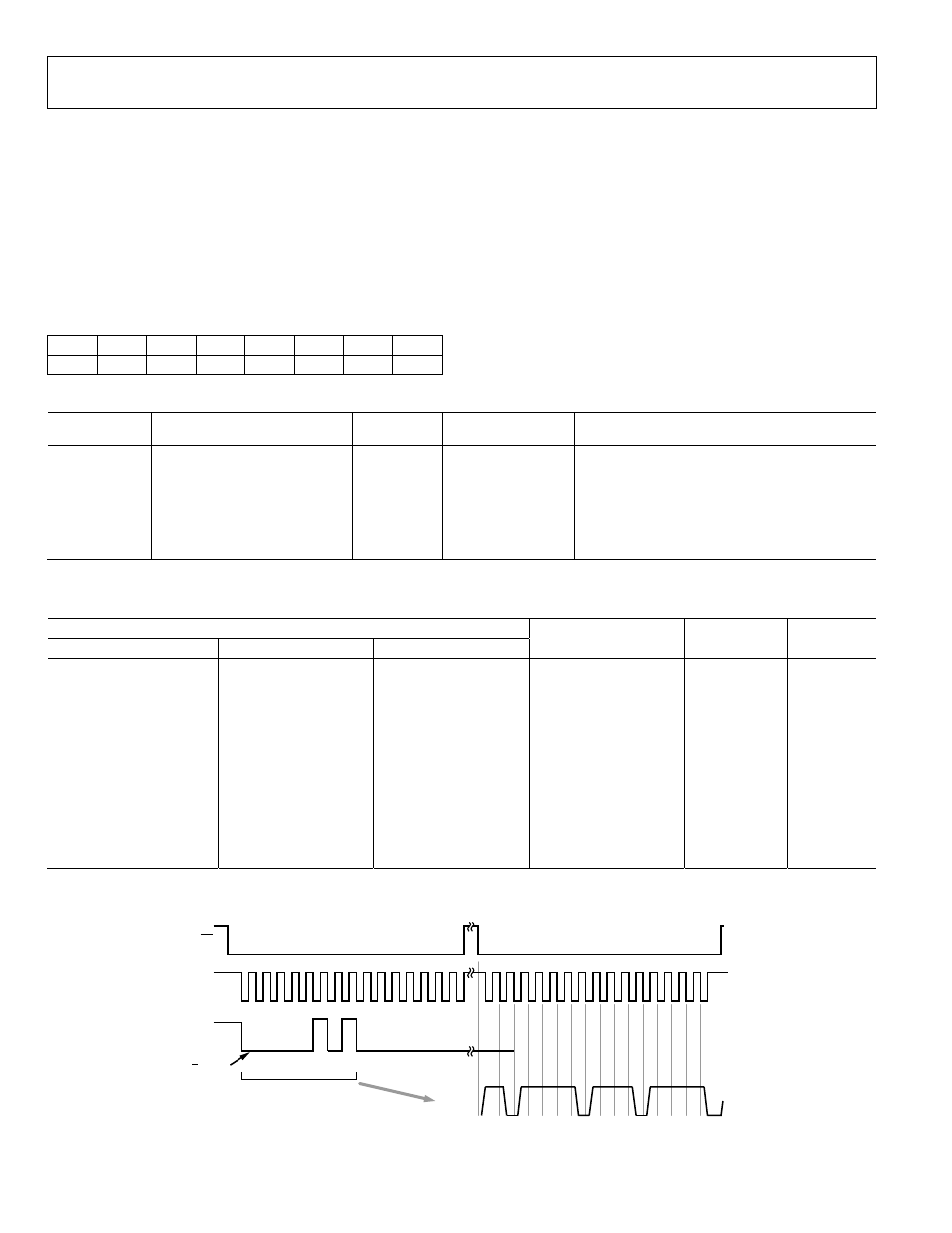
Table 7 displays the output coding for the GYRO_OUT register.
Figure 22 provides an example SPI read cycle for this register.
Table 6. Data Output Register Information
Name
Function
Address
Resolution (Bits)
Data Format
Scale Factor (per LSB)
ENDURANCE
Flash Memory Write Counter
0x01, 0x00
16
Binary
1 count
SUPPLY_OUT
Power Supply Data
0x03, 0x02
12
Binary
1.8315 mV
GYRO_OUT Gyroscope
Data
0x05,
0x04 14
Twos
Complement 0.07326°/sec
AUX_ADC
Auxiliary Analog Input Data
0x0B, 0x0A
12
Binary
0.6105 mV
TEMP_OUT Sensor
Temperature
Data
0x0D, 0x0C
12
Twos Complement
0.1453°C
ANGL_OUT
Angle Output
0x0F, 0x0E
14
Binary
0.03663°
1
Assumes that the scaling is set to 320°/sec.
Table 7. Output Coding Example, GYRO_OUT
Rate of Rotation
±320°/sec Range
±160°/sec Range
±80°/sec Range
Binary Output
Hex Output
Decimal
600°/sec
300°/sec
150°/sec
01 1111 1111 1111
0x1FFF
8191
320°/sec
160°/sec
80°/sec
01 0001 0001 0000
0x1110
4368
80°/sec
40°/sec
20°/sec
00 0100 0100 0100
0x0444
1092
40°/sec
20°/sec
10°/sec
00 0010 0010 0010
0x0222
546
0.07326°/sec
0.03663°/sec
0.018315°/sec
00 0000 0000 0001
0x0001
1
0°/sec
0°/sec
0°/sec
00 0000 0000 0000
0x0000
0
−0.07326°/sec
−0.03663°/sec
−0.018315°/sec
11 1111 1111 1111
0x3FFF
−1
−40°/sec −20°/sec
−10°/sec
11 1101 1101 1110
0x3DDE
−546
−80°/sec −40°/sec
−20°/sec
11 1011 1011 1100
0x3BBC
−1092
−320°/sec −160°/sec
−80°/sec
10 1110 1111 0000
0x2EF0
−4368
−600°/sec −300°/sec
−150°/sec
10 0000 0000 0000
0x2000
−8192
1
Two MSBs have been masked off and are not considered in the coding.
2
Nominal sensitivity and zero offset null performance are assumed.
CS
SCLK
DIN
DOUT
ADDRESS = 000101
DATA = 1011 1101 1101 1110
NEW DATA, NO ALARM, GYRO_OUT = –40°/SECOND
W/R BIT = 0
0
607
0-
008
Figure 22. Example Read Cycle, ±320°/sec Setting